FOC简介
目前主流的FOC控制是无刷直流电机和永磁同步电机高效控制的最优方法之一。
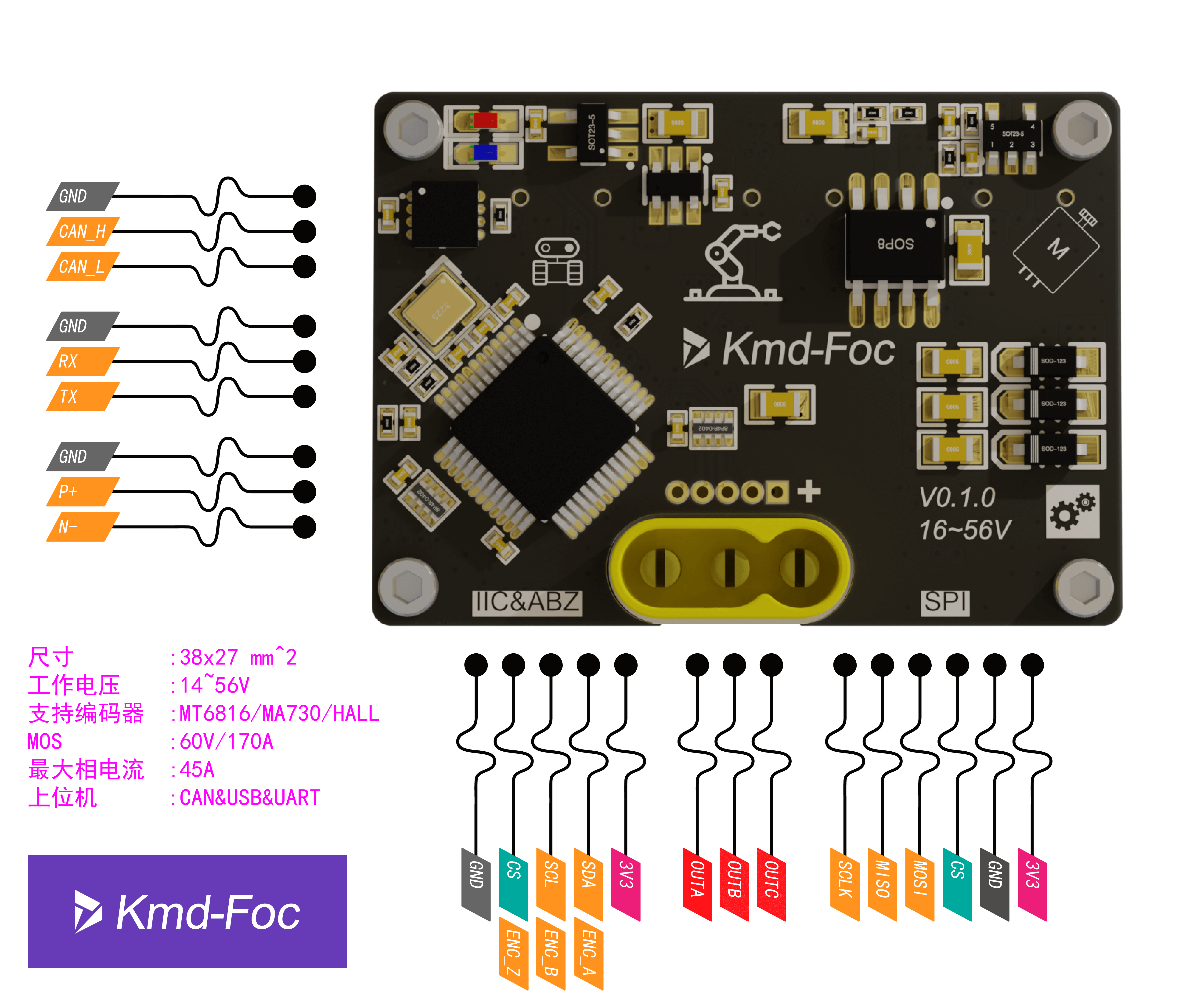
编码器
支持多种绝对值编码(已内置MA730、MT6825、AS5047等驱动)和霍尔编码器。
控制方式
支持电流控制、电流爬升、转速控制、转速爬升、位置控制和位置轨迹等控制模式以满足不同应用。
参数识别
支持自动识别电机参数,支持自动校准编码器,可兼容绝大多数三相无刷直流电机。
图形上位机
具有图形化配置的上位机,可以方便用户进行数据调参和优化,同时支持波形显示功能(下版本将改为QT)。
控制接口支持
支持USB、CAN、UART、CAN_FD(目前版本不支持)等通用API接口,提供相应的通信控制库。
控制通信库
提供了同时支持 USB、CAN、UART、CAN_FD 的数据通信方式,同时用户可以更改程序进行自定义通信方式。
官方案例
目前主要包含基于霍尔编码器轮毂电机的平衡车案例,和基于SPI绝对值编码器的多电机控制案例。
FOC算法库
提供基于算法库的程序源码,算法层和板级驱动层分离,用户可更改相关硬件资源进行自己的FOC控制器设计。
典型应用
机器人关节、机器人外骨骼、机器人末端执行器、高集成度私服控制系统、扫地机器人等。
内置保护
内置过流保护、欠压保护、过压保护、超速保护等多种保护机制、温度保护(待添加)。
目前直流无刷电机应用越来越广泛,如无人机、机械臂、云台、仿生机器人等等。同时电机控制是自动化控制领域重要一环。而目前主流的FOC 控制是目前无刷直流电机和永磁同步电机高效控制的最优方法之一。FOC 旨在通过精确地控制磁场大小与方向,使得电机的运动转矩平稳、噪声小、效率高,并且具有高速的动态响应。
在 Foc 控制中 KmdFoc 将会是一个不错的可行方案,自动识别参数可以使其支持大部分的直流无刷电机。
开源 KmdFoc