Yolo-for-k210
应用&支持
Yolo-for-k210
环境配置
- 常规版本
- windows
- python3.7
- tensorflow-gpu1.15
- cuda10.0
- cudnn7.4.2
- 其它扩展你可以使用
pip3 install -r requirements.txt命令添加。
- 30显卡系列
- windows-wsl-ubuntu20.04
- python3.8.16
- tensorflow-gpu1.15.5
nvidia-pyindexnvidia-tensorflow[horovod]nvidia-tensorboard==1.15
- cuda11.1
- cudnn8.6
- 其它扩展你可以使用
pip3 install -r requirements.txt命令添加。 - nvidia 为兼容最新的显卡驱动舍弃了对lite的支持,因此要想使用toco工具,可尝试安装tf2版本提供模型转换工具。
准备数据集
推荐使用Vott工具对数据集进行标注,导出为PascalVoc格式。
案例 VOC 数据集存储于
/train-image/VOCdevkit,你可以修改为自定义数据集路径为/train-image/your_img。
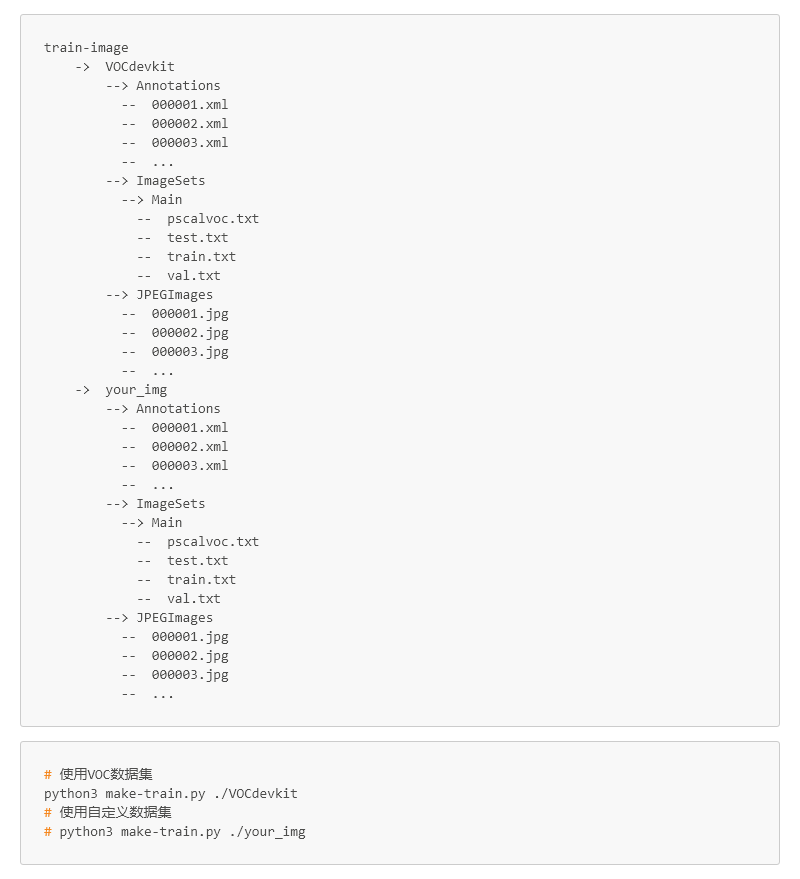
- 运行
make-train.py脚本,会按照7:2:1的比例,分配为训练集、验证集、测试集文件(pscalvoc.txt、train.txt、val.txt、test.txt),同时会自动检测并删除不成对的多余文件。
- Win平台手动下载并合并数据集。
- Linux平台下载数据集。
cd ./train-image
wget https://pjreddie.com/media/files/VOCtrainval_11-May-2012.tar
wget https://pjreddie.com/media/files/VOCtrainval_06-Nov-2007.tar
wget https://pjreddie.com/media/files/VOCtest_06-Nov-2007.tar
# 解压文件
tar xf VOCtrainval_11-May-2012.tar
tar xf VOCtrainval_06-Nov-2007.tar
tar xf VOCtest_06-Nov-2007.tar
# 合并数据集
cd VOCdevkit/
mv ./VOC2007/* ./
cp -r ./VOC2012/* ./
rm -rf VOC2007
rm -rf VOC2012- 分配数据集。
# 使用VOC数据集
python make-train.py ./VOCdevkit# 使用自定义数据集
python make-train.py ./your_img- 数据集预处理
voc_label.py。
- 修改
voc_label.py。

# 使用VOC数据集
python voc_label.py
cat VOCdevkit_train.txt VOCdevkit_val.txt> train.txt #Linux使用此命令
# type VOCdevkit_train.txt VOCdevkit_val.txt> train.txt #windowns使用此命令# 使用自定义数据集
python voc_label.py
cat your_img_train.txt your_img_val.txt> train.txt #Linux使用此命令
# type your_img_train.txt your_img_val.txt> train.txt #windowns使用此命令检查 txt 文件内容是否正确,文件内容为图片路径。
将 JPEGImages 路径和 Annotations 合并到一个NPY 文件中。
python make_voc_list.py train.txt data/voc_img_ann.npy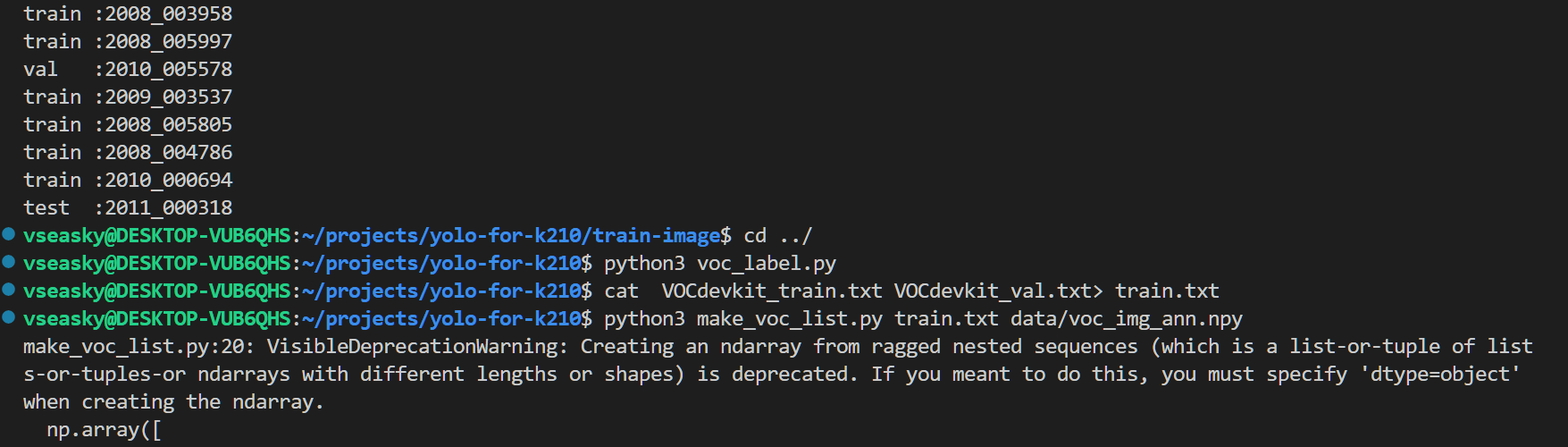
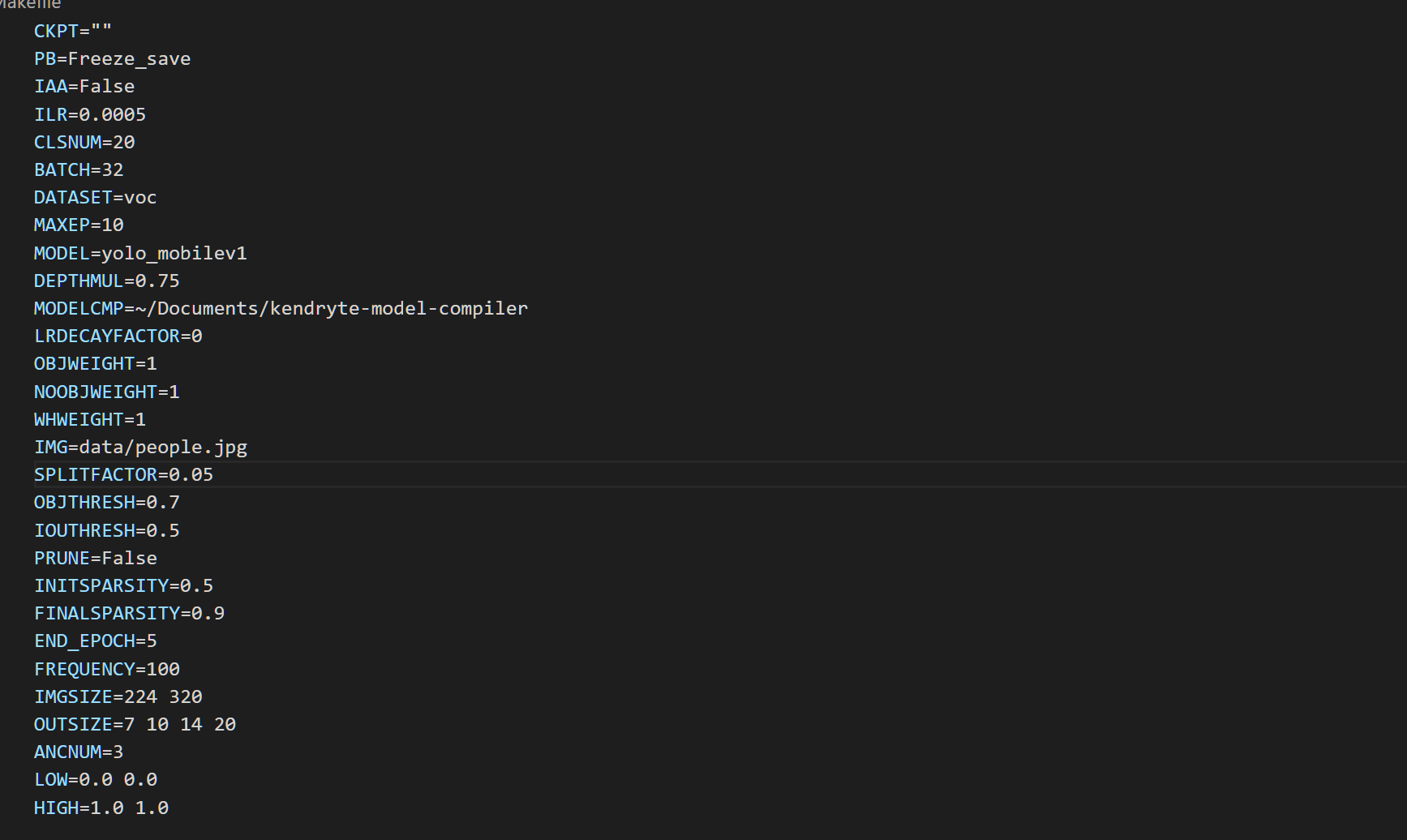
修改配置文件
你可以直接在 Makefile 编辑默认配置,又或者在 make 操作时传入参数。
生成 Anchors
加载Annotations生成 Anchors (LOW 和 HIGH 视数据集的分布而定):
# make anchors # 使用默认参数
make anchors DATASET=voc ANCNUM=3 LOW="0.0 0.0" HIGH="1.0 1.0" # 更改自定义参数当你成功的时候,你会看到这样以下内容:
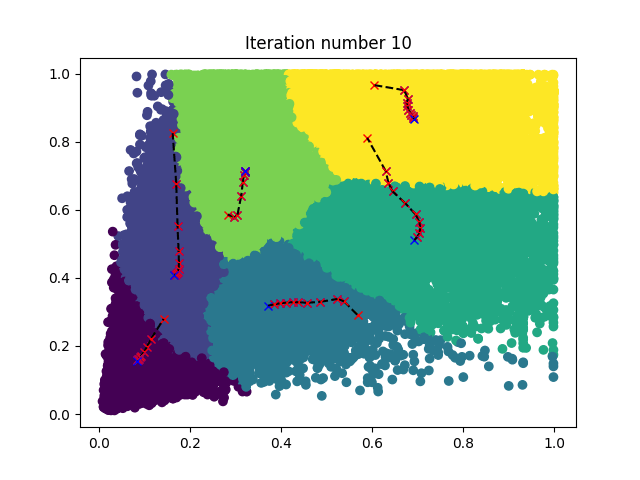

注:结果是随机的。当你有错误时,就重新运行它。
如果要使用自定义数据集,只需修改脚本并生成 data/{your_img}_img_ann.npy,然后使用 make anchors DATASET=your_img。更多选项请参见 python ./make_anchor_list.py -h
如果要更改输出层的数目,则应修改 OUTSIZE 在 Makefile
下载预训练模型
你必须下载您想要训练的模型权重,因为默认情况下会加载训练前的权重。把文件放进./data 目录。
MODEL | DEPTHMUL | Url | Url |
|---|---|---|---|
| yolo_mobilev1 | 0.5 | google drive | weiyun |
| yolo_mobilev1 | 0.75 | google drive | weiyun |
| yolo_mobilev1 | 1.0 | google drive | weiyun |
| yolo_mobilev2 | 0.5 | google drive | weiyun |
| yolo_mobilev2 | 0.75 | google drive | weiyun |
| yolo_mobilev2 | 1.0 | google drive | weiyun |
| tiny_yolo | google drive | weiyun | |
| yolo | google drive | weiyun |
训练
使用 Mobileenet 时,需要指定 DEPTHMUL 参数。 使用 tiny yolo 或 yolo 你不需要设定 DEPTHMUL.
- 设置并开始训练:MODE-LDEPTHMUL
make train MODEL=yolo_mobilev1 DEPTHMUL=0.75 MAXEP=10 ILR=0.001 DATASET=voc CLSNUM=20 IAA=False BATCH=16
使用 Ctrl+C 停止训练,它将自动在日志目录中保存权重和模型。
- 设置为继续训练:CKPT
make train MODEL=yolo_mobilev1 DEPTHMUL=0.75 MAXEP=10 ILR=0.0005 DATASET=voc CLSNUM=20 IAA=False BATCH=16 CKPT=log/xxxxxxxxx/yolo_model.h5- 设置为启用数据增强:IAA
make train MODEL=xxxx DEPTHMUL=xx MAXEP=10 ILR=0.0001 DATASET=voc CLSNUM=20 IAA=True BATCH=16 CKPT=log/xxxxxxxxx/yolo_model.h5- 使用 tensorboard:
tensorboard --logdir log注意:更多选项请参阅与python ./keras_train.py -h
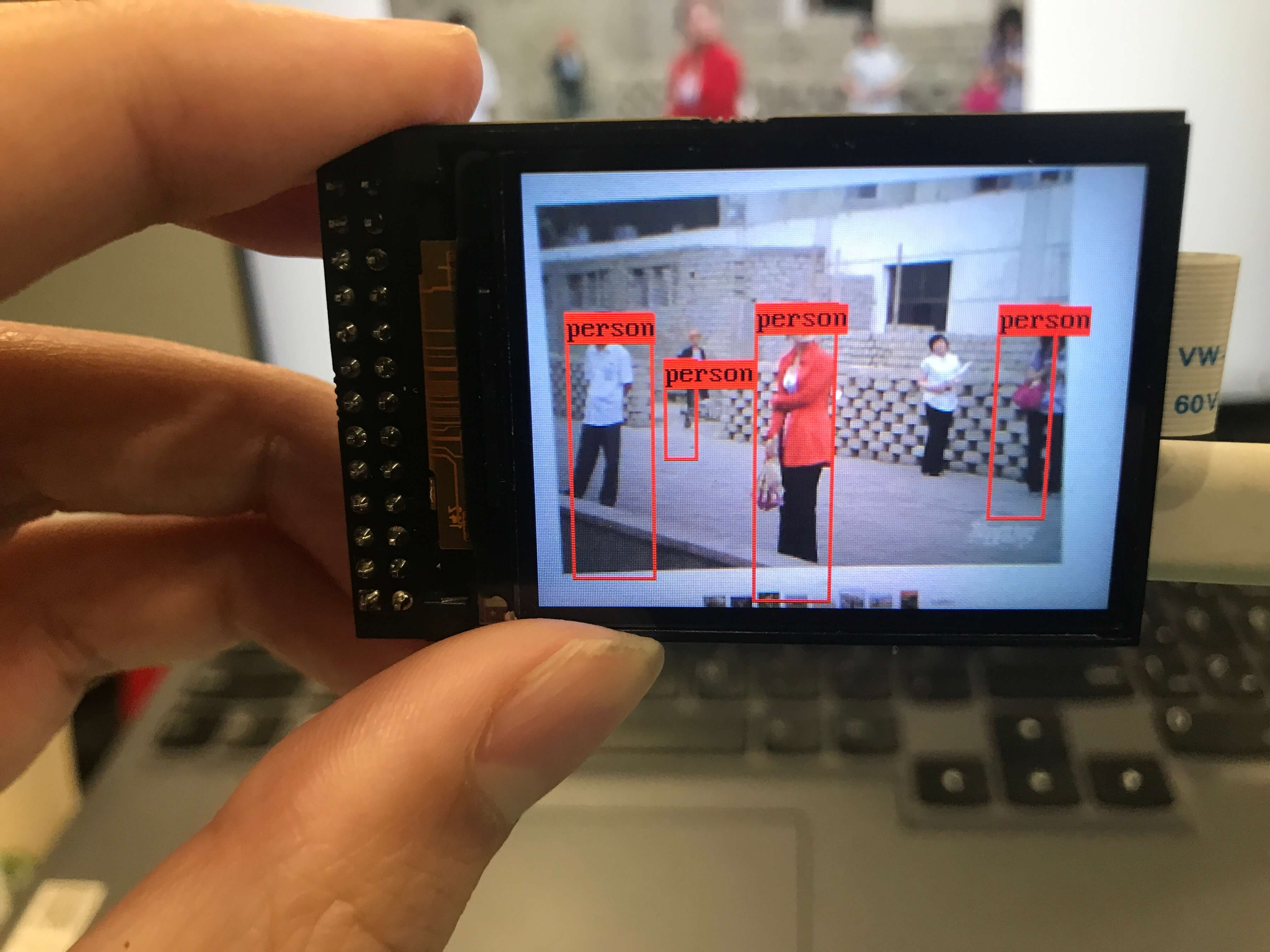
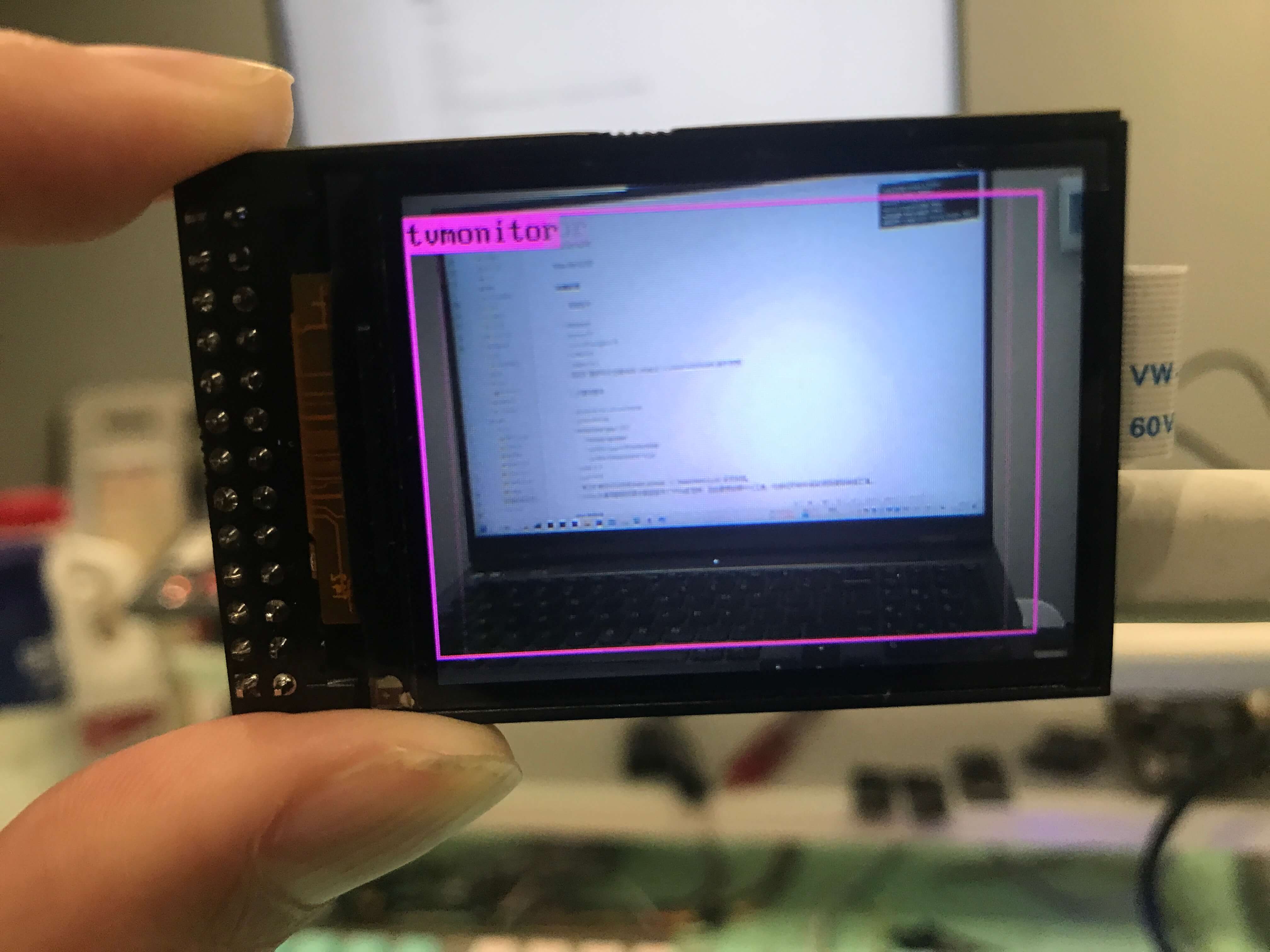
推理
- 使用自己训练的模型
make inference MODEL=yolo_mobilev1 DEPTHMUL=0.75 CLSNUM=20 CKPT=log/xxxxxx/yolo_model.h5 IMG=data/input/people.jpg- 你可以尝试我的模型:
make inference MODEL=yolo_mobilev1 DEPTHMUL=0.75 CKPT=asset/yolo_model.h5 IMG=data/input/people.jpg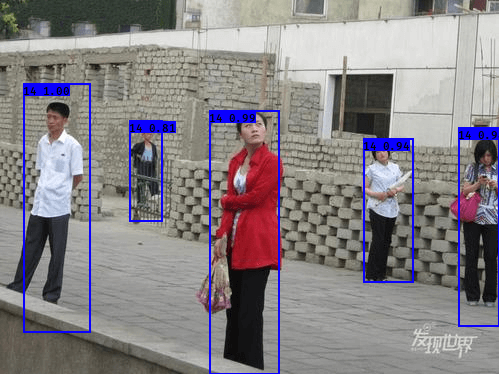
make inference MODEL=yolo_mobilev1 DEPTHMUL=0.75 CKPT=asset/yolo_model.h5 IMG=data/input/dog.jpg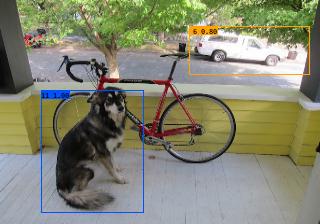
注:由于 anchors 是随机生成的,如果您的结果与上面的图像不同,你只需要加载这个模型并继续训练一段时间。
更多选项请参见python ./keras_inference.py -h
修剪模型
make train MODEL=xxxx MAXEP=1 ILR=0.001 DATASET=voc CLSNUM=20 BATCH=16 PRUNE=True CKPT=log/xxxxxx/yolo_model.h5 END_EPOCH=1训练结束时,将模型保存为 log/xxxxxx/yolo_prune_model.h5.
Freeze
toco --output_file data/tflite/mobile_yolo.tflite --keras_model_file log/xxxxxx/yolo_model.h5现在你有了 mobile_yolo.tflite
转换 Kmodel
./nncase/0.1.0/ncc --version
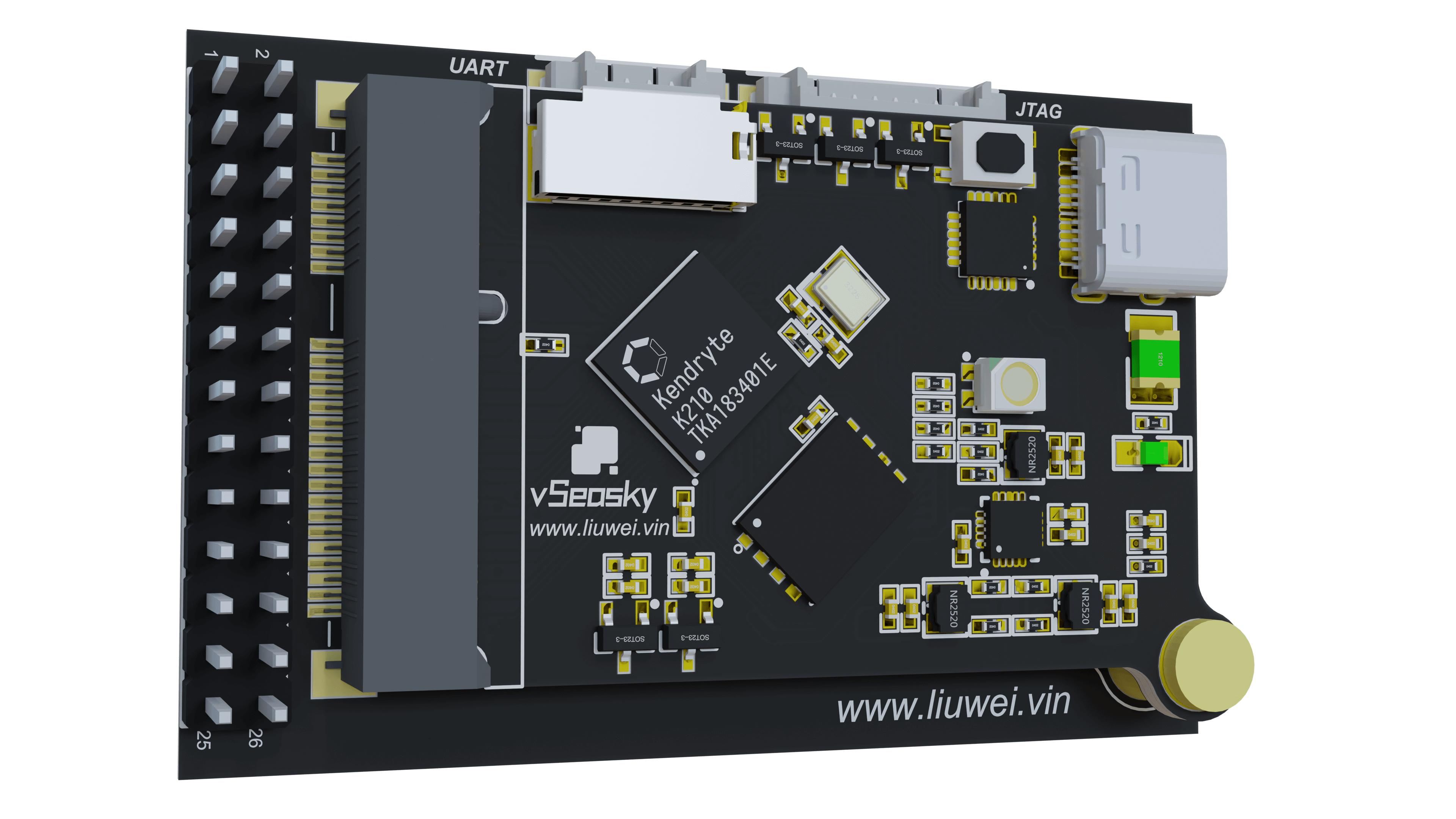
./nncase/0.1.0/ncc data/tflite/mobile_yolo.tflite mobile_yolo_v3.kmodel -i tflite -o k210model --dataset nncase-images将 Kmodel 部署到 K210
这是一个完整的解决方案,底层的硬件和软件部署请参考 vseasky/riscv-k210
常见问题&FAQ
- 默认参数Makefile
- OBJWEIGHT,, 用于平衡精度和召回率 NOOBJWEIGHT,WHWEIGH
- 默认输出两层,如果需要更多输出层可以修改 OUTSIZE
- 如果要使用完整的 yolo,则需要将 和 在 Makefile 中修改为原始 yolo 参数 IMGSIZE,OUTSIZE
参考
2020/7/5 21:04:35