KmdFoc 资源
大约 8 分钟KmdFoc使用指南
KmdFoc 资源
参数信息
| 尺寸 | 38x27mm |
|---|---|
| 工作电压 | 12~48V |
| 锂电池 | 支持3S~6S动力电池 |
| 编码器 | 支持MT6825等多种编码器,可自行选择 |
| 支持电流 | 0~42A相电流(持续) |
| SPI编码器接口 | SHB1.0带锁扣-6AWB卧贴 |
| HALL接口 | SHB1.0带锁扣-5AWB卧贴 |
| CAN通信接口 | SHB1.0带锁扣-3AWB卧贴 |
| 串口通信接口 | SHB1.0带锁扣-3AWB卧贴 |
| USB通信接口 | SHB1.0带锁扣-3AWB卧贴 |
| 指示灯 | 电源指示灯&设备ID和故障指示灯 |
| 散热设计 | 2mm 12W硅胶散热&1.6mm厚铝基板 |
| MOS参数信息 | 60V/170A |
实际案例资源
- 位置控制方式实现电机模拟拨轮旋钮功能
- 转速控制方式实现电机模拟拨轮旋钮功能
- 电机模拟带阻力的旋钮
- 电机模拟带阻尼回正的旋钮
- 电机模拟为弹簧旋钮
- 自由模式
- 双电机互控&力矩放大
- 单方向同步&力矩放大
- 四个电机进行相互控制&力矩放大(每个电机的力矩都可以不一样)
- 基于 SDK 通信库的上位机 DEMO
- 基于 STM32F4 和轮毂电机开发的平衡车案例
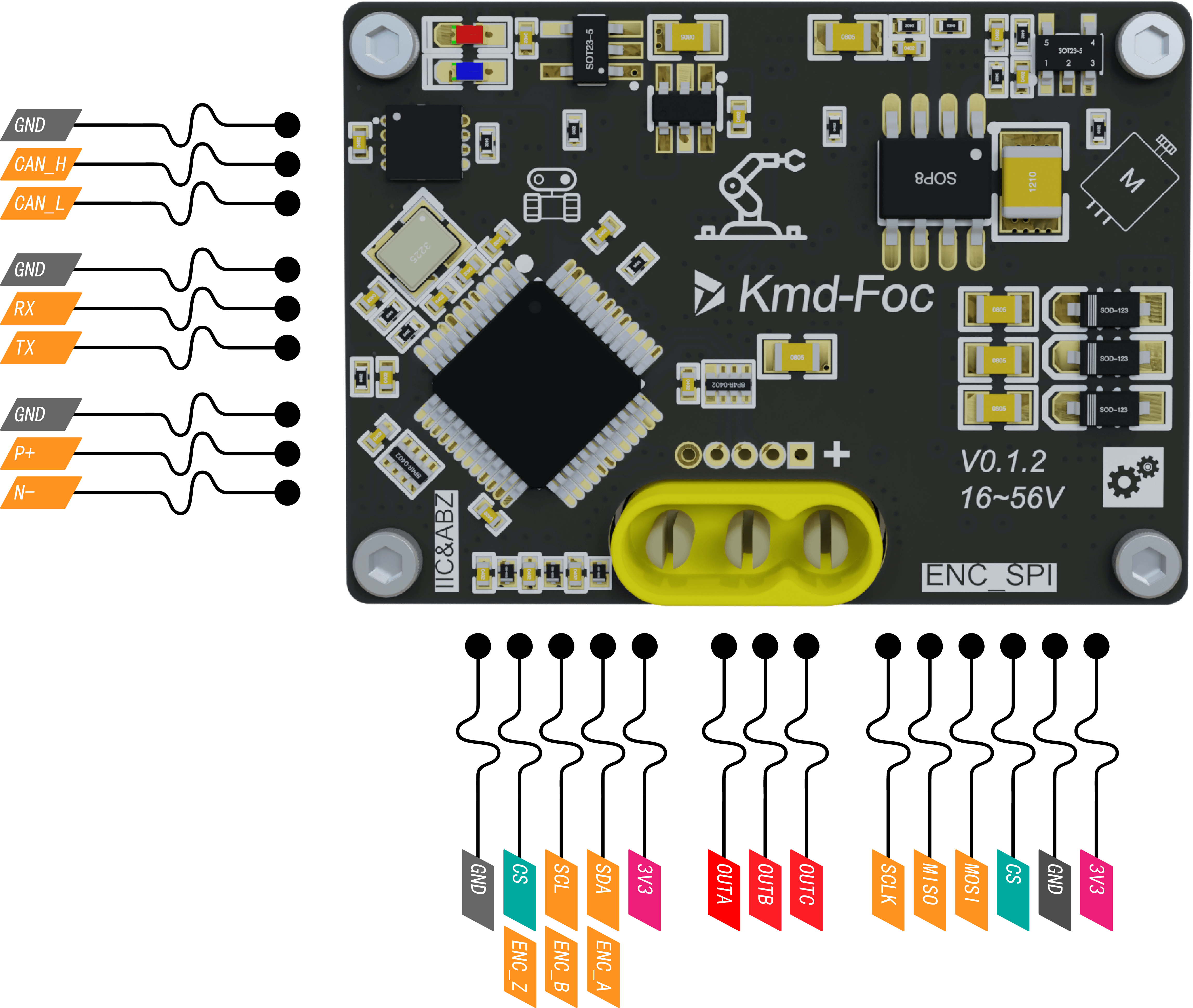
支持的编码器接口
- SPI 绝对值编码器: MT6825,分辨率 18bit
- SPI 绝对值编码器: AS5047P,分辨率 14bit
- SPI 绝对值编码器: MA730,分辨率 14bit(不推荐)
- 增量式编码器: 电机自带的 HALL 编码器
参数识别
提示
KmdFoc 支持参数识别,一键校准,无须调参即可适应市面上绝大多数三相直流无刷电机,以下是测试通过的电机型号。
| 已检验无刷电机 | 实物图片 | 说明 |
|---|---|---|
| 极飞A12 | 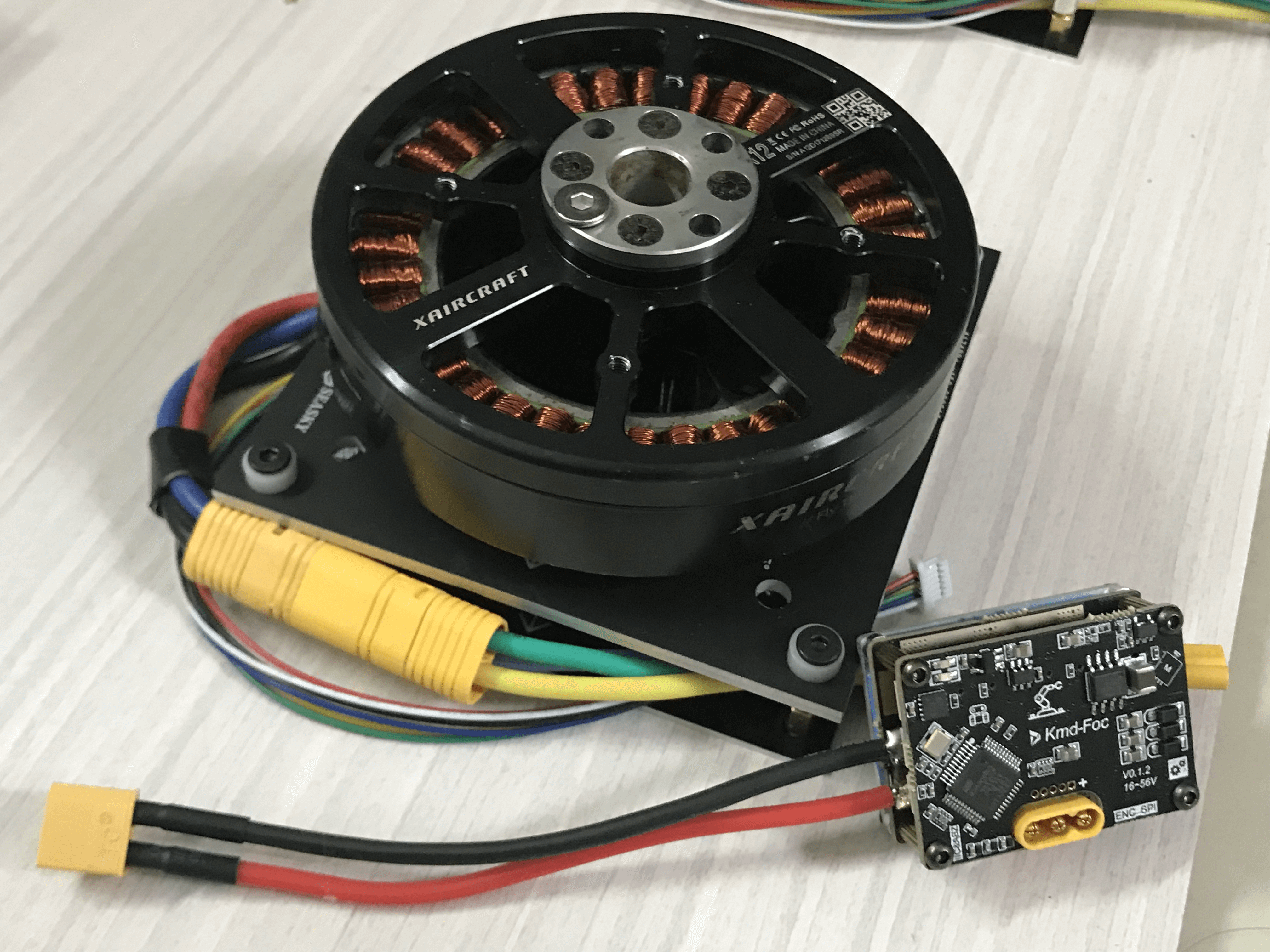 | 电压48V以下拆机电机,无具体参数,除了臭点、都能接受。 |
| 5010-KV280 | 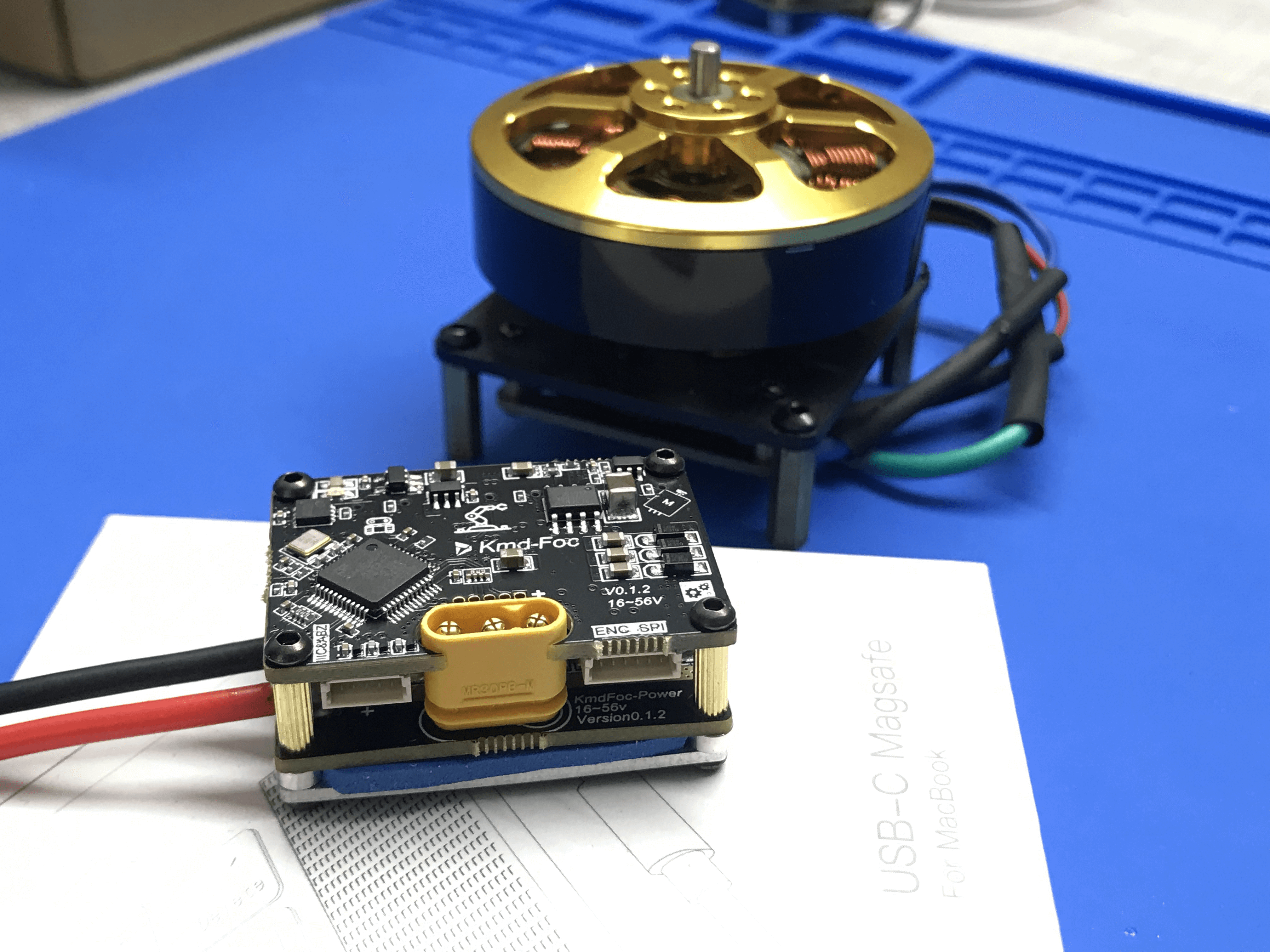 | 6S电池MAX:40~50A |
| 5008-KV335/KV400 | 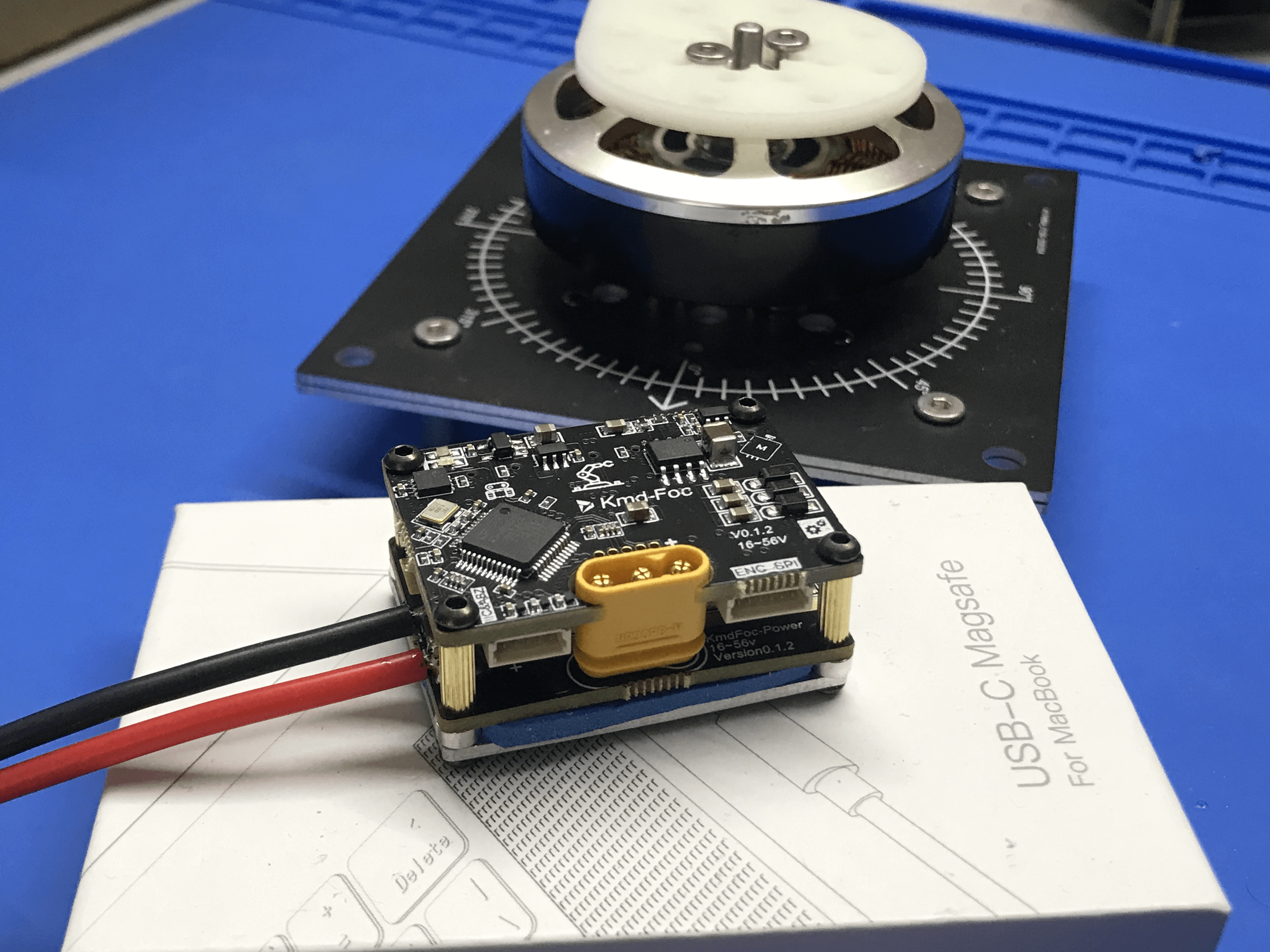 | 6S电池MAX:40~50A |
| DJI-SNAIL-KV2400 |  | 12~24VMAX:15~20A |
| DJI-精灵-2312 | 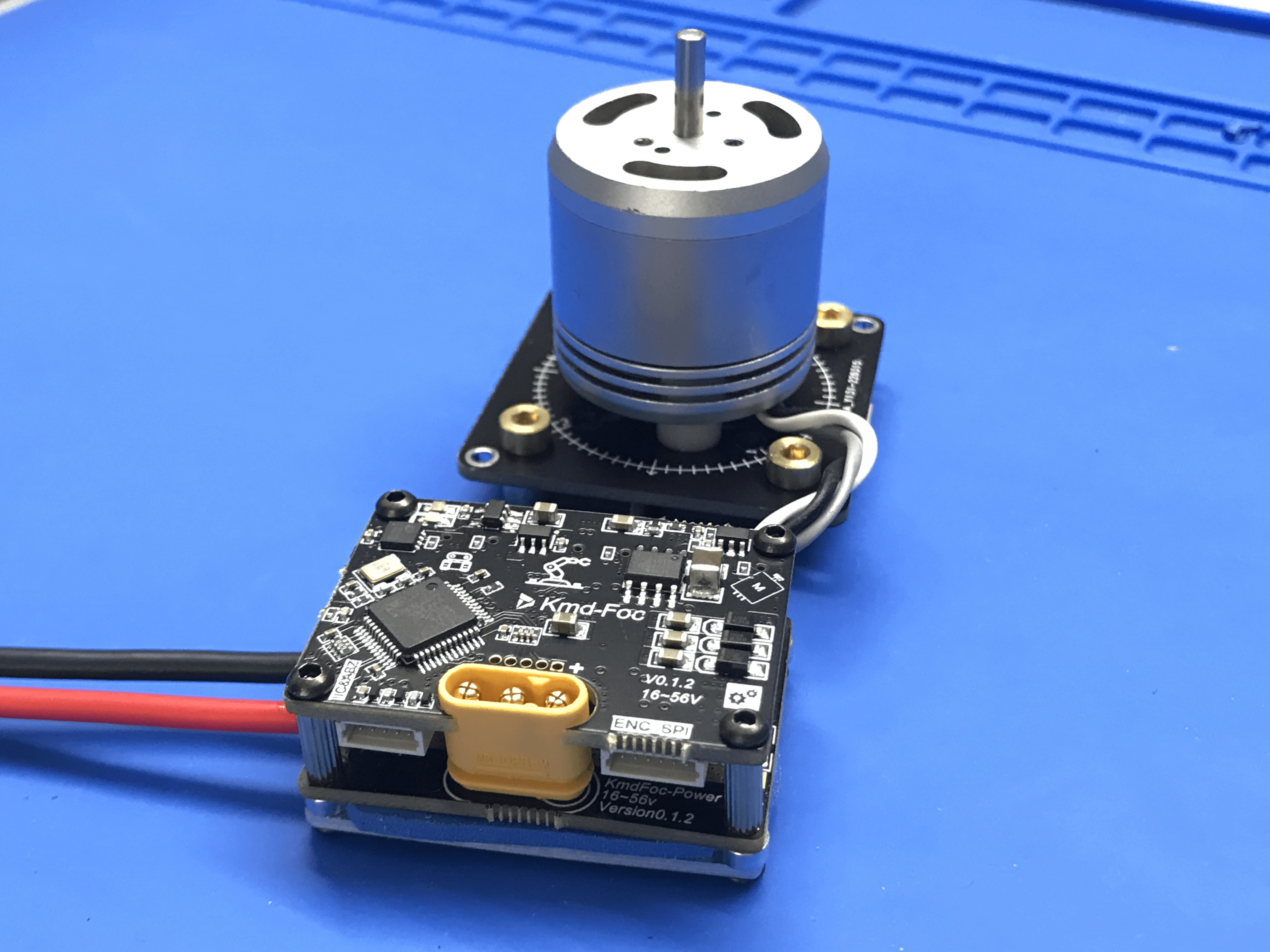 | 12~24V(?)MAX:15~20A(?) |
| Sunnysky-X2212-Kv80 |  | 2~4S电池MAX:20A |
| P80-KV120 | 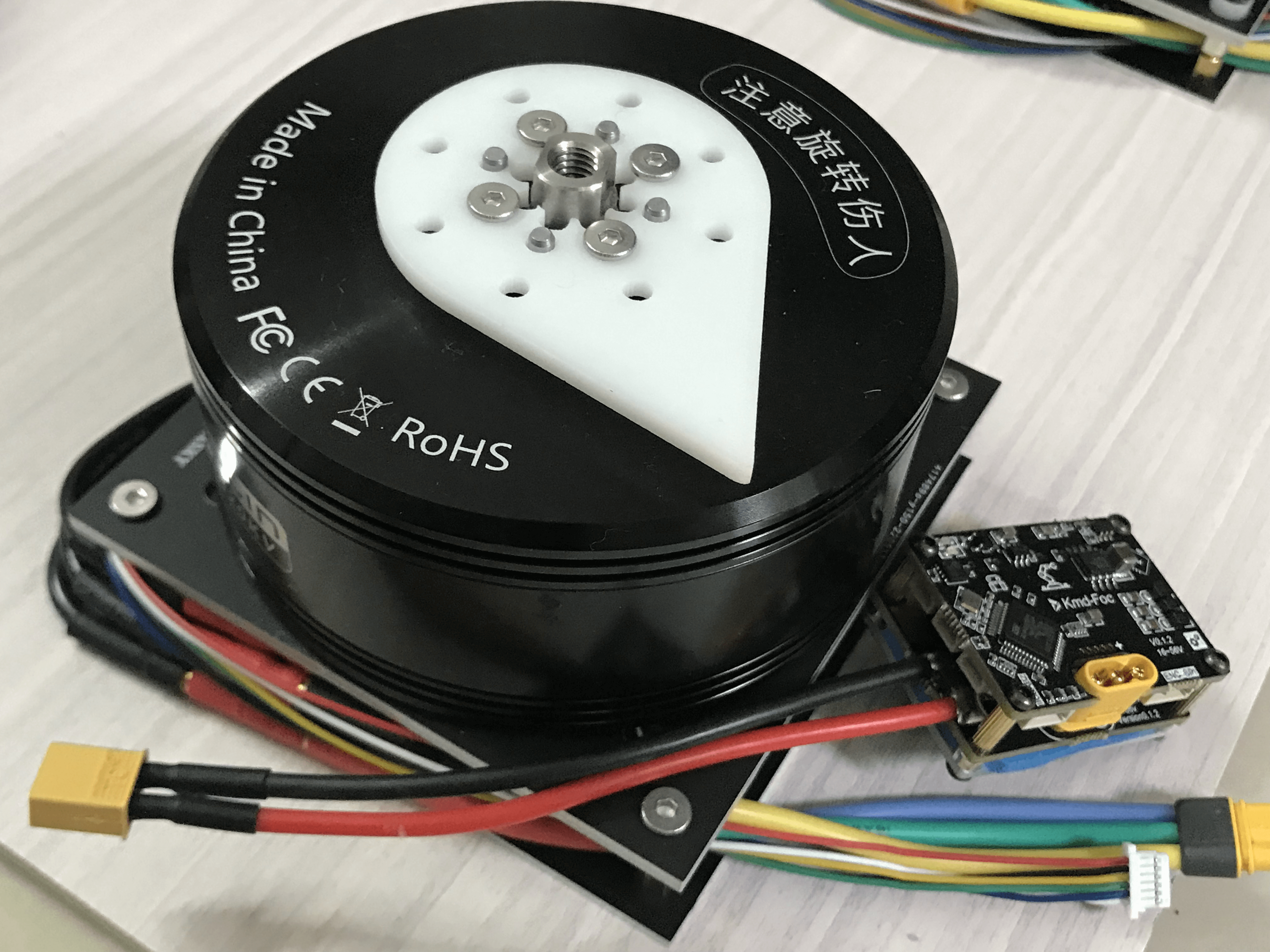 | 48V |
| X8308S-KV180 | 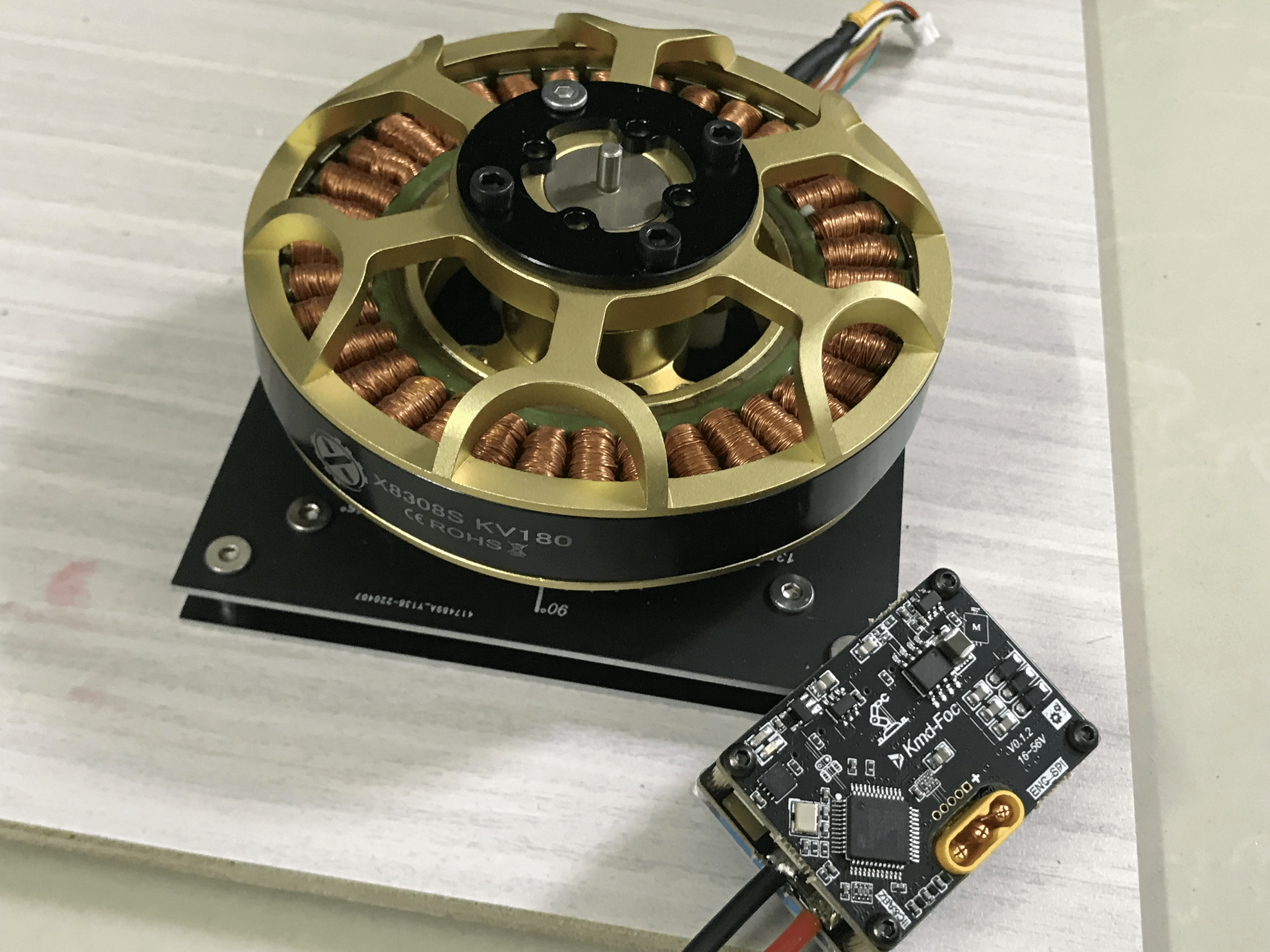 | 6~8s电池MAX:38A |
KmdFoc上位机
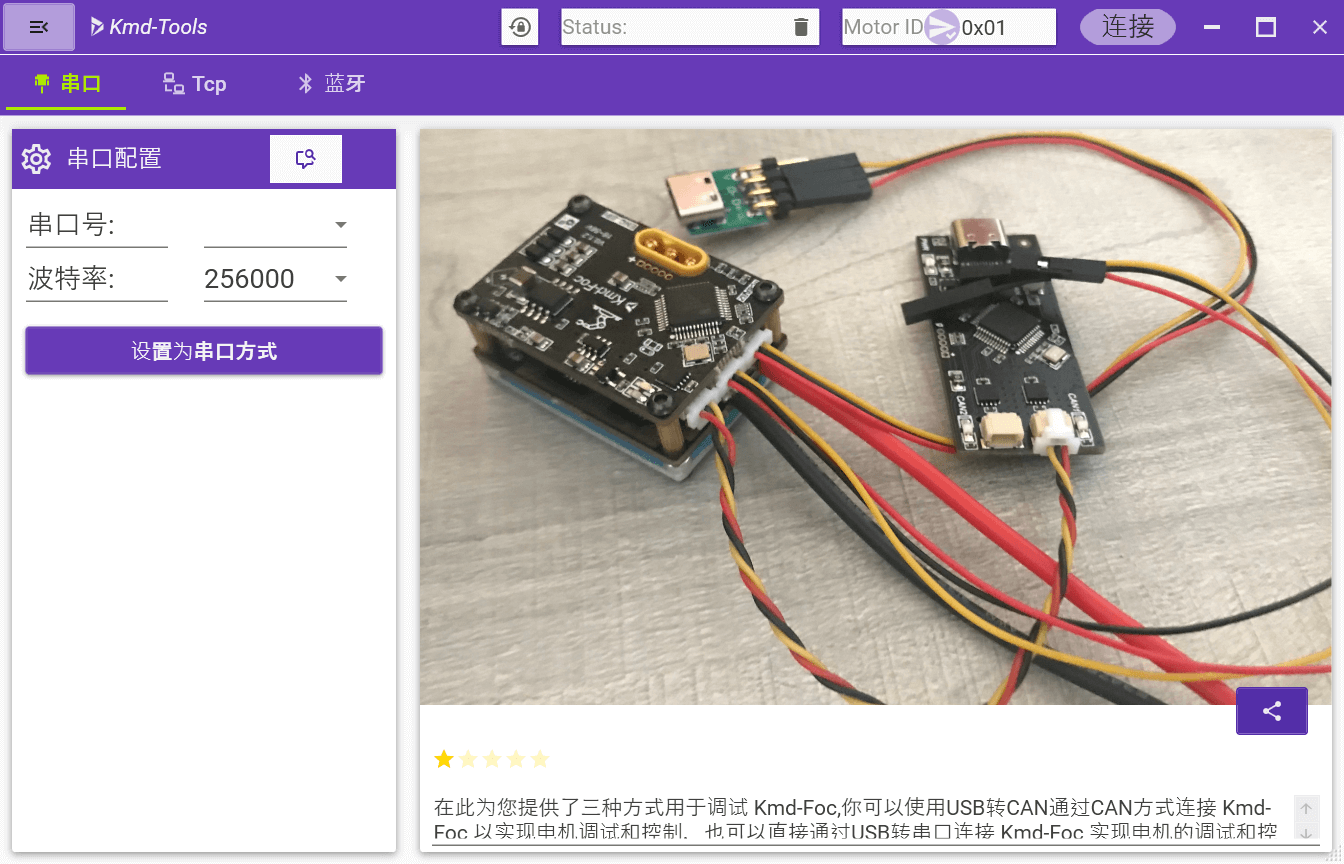 | 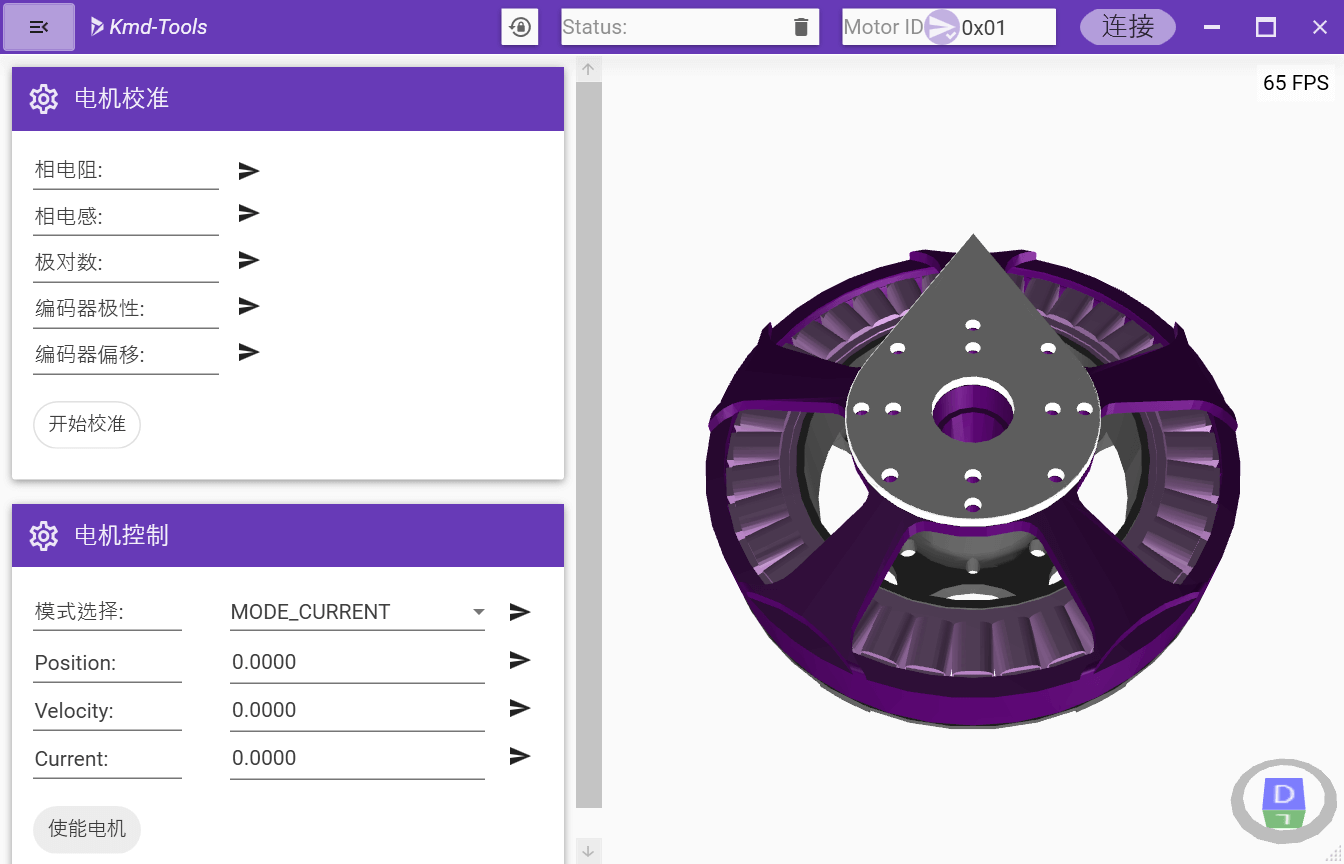 |
|---|---|
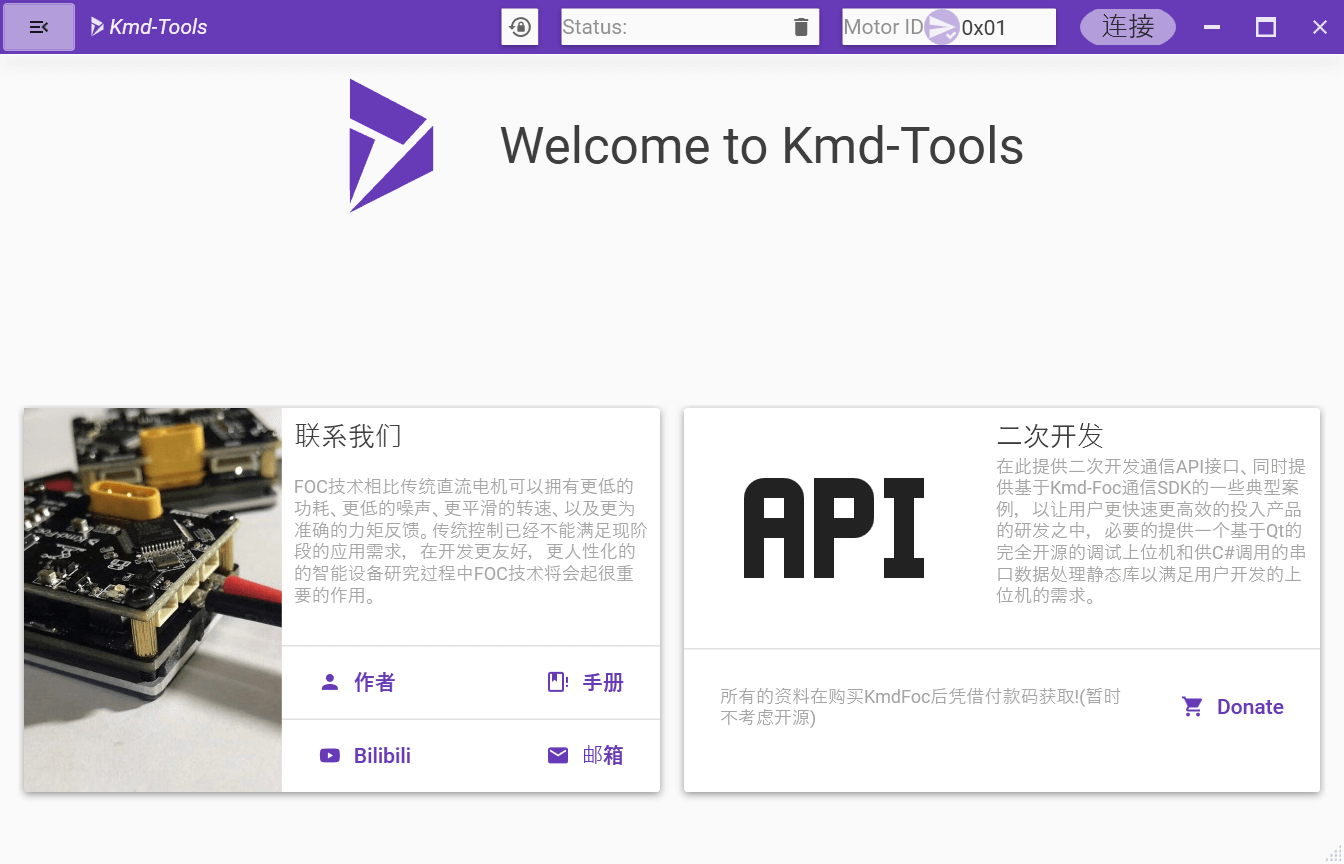 | 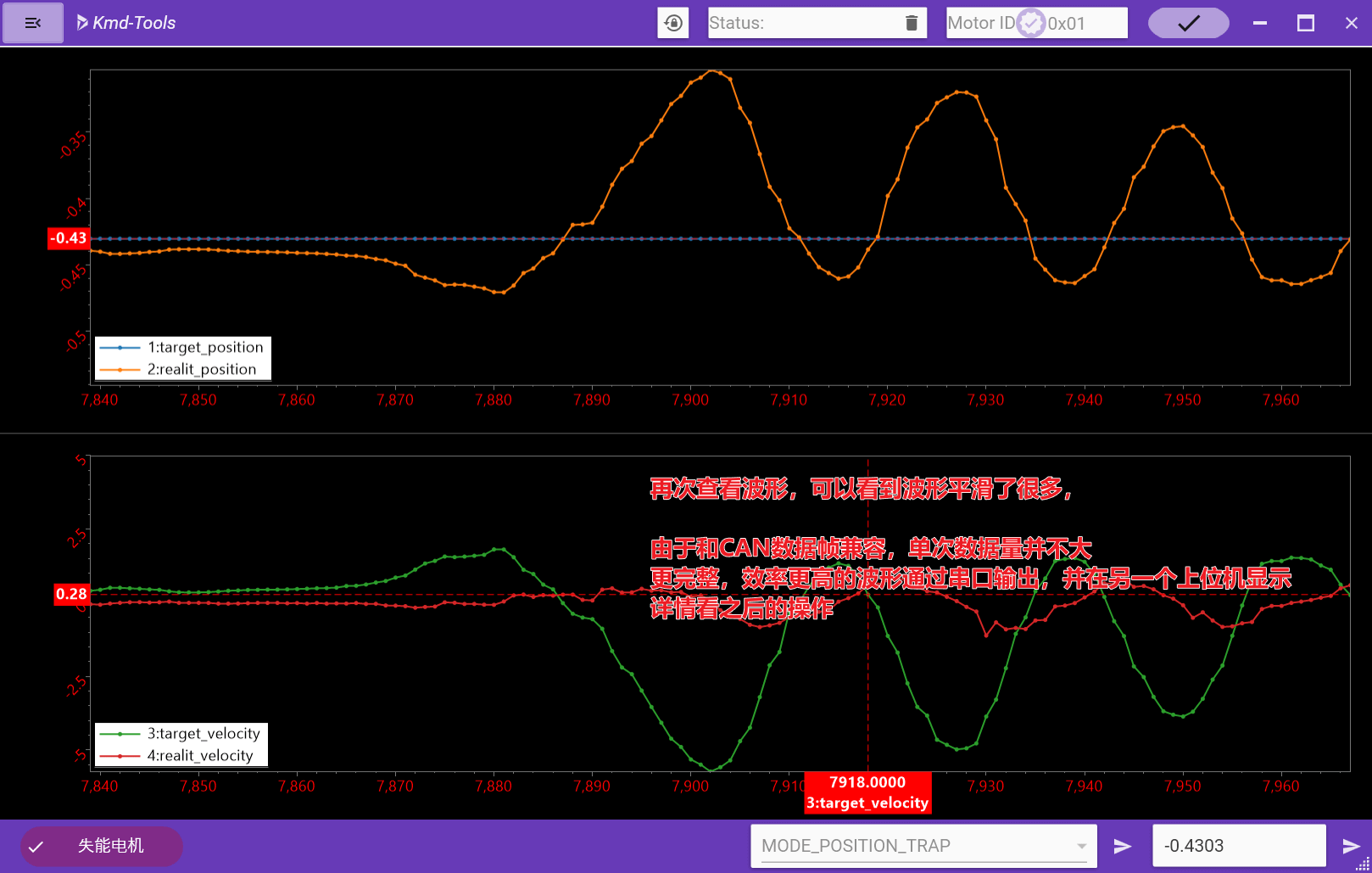 |
注意
配件包:注意配件包不包含编码器和 MR30 接口
| 型号 | 数量 |
|---|---|
| KmdFoc核心板 | x1 |
| KmdFoc功率板 | x1 |
| 铝基板散热片 | x1 |
| 12W散热硅胶 | x1 |
| USB转杜邦接头 | x1 |
| MT6825编码器空板 | x1 |
| MA730编码器空板 | x1 |
| AS5047编码器空板 | x1 |
| 兼容多种型号电机的铝基板固定板(9.4x9.4cm^2) | x1 |
| M2x8 滚花螺柱 | x4 |
| M2x7 螺母 | X8 |
| M2x2 垫片 | x4 |
| XT30端子线 | x1 |
| 定制款3p带锁扣sh1.0硅胶绞线 | x1 |
| 定制款5p带锁扣sh1.0硅胶线 | x1 |
| 定制款6p带锁扣sh1.0硅胶线 | x1 |
| 定制款3p带锁扣sh1.0转杜邦母头硅胶线 | x3 |
| 680uF 80V电容 | x1 |
加购配件
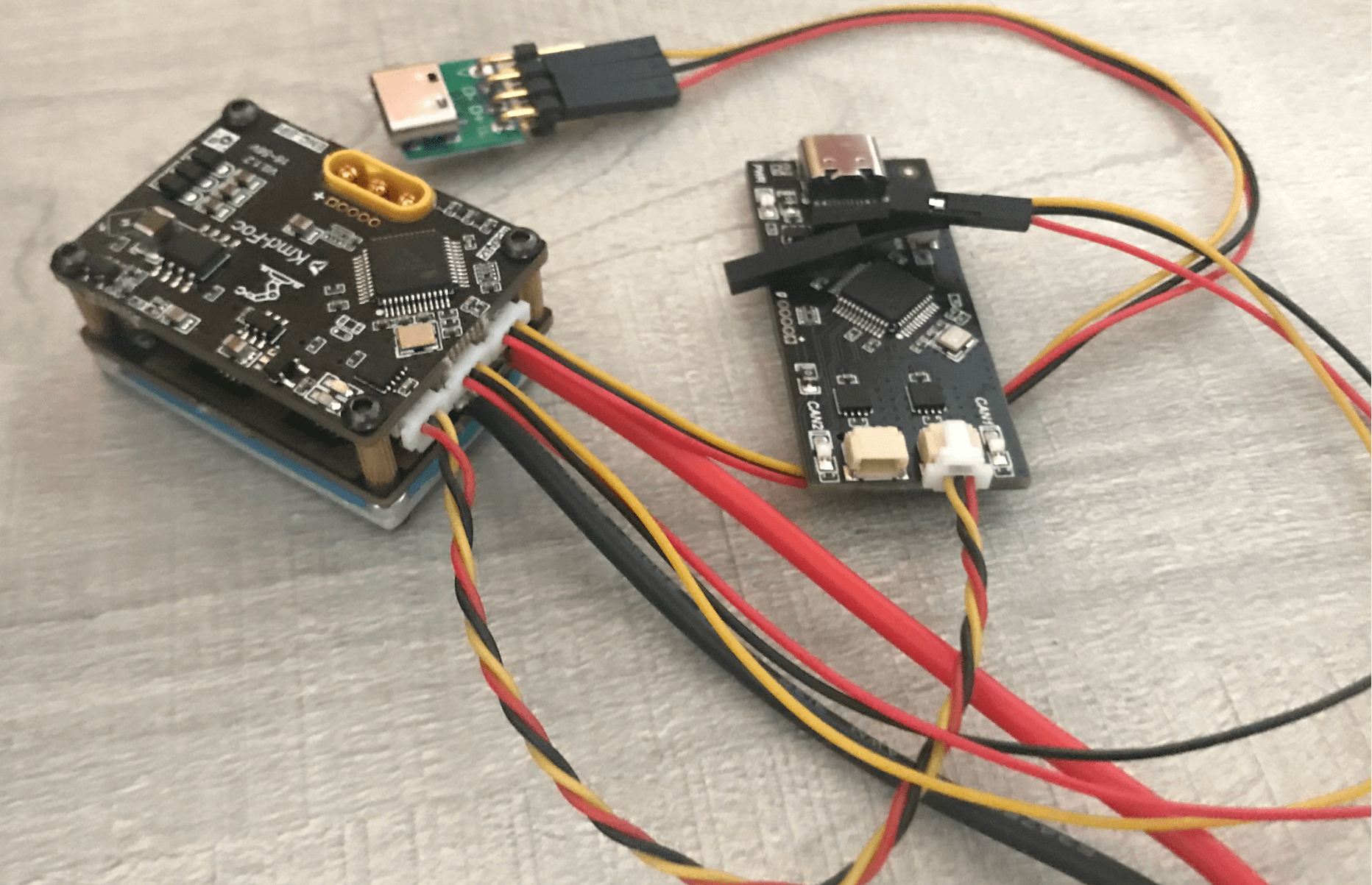
USB 转 CAN 模块(此模块完全开源)
USB转CAN调试&测试DEMO
提示
在此使用 USB 转 CAN 的第二路 CAN 做了测试案例,用户在测试完成后,也可自行修改 USB 转 CAN 的固件作为两路的 USB 转 CAN 使用。如需修改固件,则协议请自行制定,或基于 Seasky 协议扩展(建议基于 Seasky 协议扩展,此处有配套的开源上位机 vSailorProject 可供调试)。

提示
程序中 CAN0 用于实现 USB 转 CAN 调试功能,CAN1 用于 KmdFoc 驱动器的 SDK 演示。此调试小板程序完全开源,用户可以自行修改程序。
在USB转CAN上有一个按键用于控制KmdFoc应用
- 使用提示
- 使用前请在程序中,配置电机数量,和需要的相关参数
- 当电机处于未使能模式时
- 单击一次按键,以获取电机的版本号等
- 连续点击两次按键,如果点击已经校准,则会使能或失能电机
- 连续点击三次按键,开始自动校准点击参数
- 连续点击四次按键,获取电机参数
- 连续点击五次按键,保存电机参数
- 连续点击六次按键,复位电机参数(没出 bug 不需要复位,会恢复出厂设置)
- 连续点击七次按键,设置编码器类型,并软复位系统,编码器类型程序中设置
- 当电机处于使能状态时
- 单击一次按键,如果点击已经校准,则会使能或失能电机
- 连续点击两次按键,切换模式为位置方式实现的拨轮旋钮功能
- 连续点击三次按键,切换模式为速度方式实现拨轮旋钮
- 连续点击四次按键,切换模式为带阻力功能的旋钮(就像扳手腕一样)
- 连续点击五次按键,切换模式为带阻尼回正的旋钮
- 连续点击六次按键,切换模式为回正的弹簧旋钮
- 连续点击七次按键,切换模式为自由模式
- 连续点击八次按键,切换模式为双电机互控,力矩放大模式
- 连续点击九次按键,切换模式为位置闭环方式实现的单方向控制
- 连续点击十次按键,切换模式为转速闭环方式实现的单方向控制
- 连续点击十一次按键,切换模式为四个电机相互控制模式,同样具备力矩放大功能。
使用流程
- 单击一次按键,以固定通信方式(如需设置编码器类型)
- 单击七次按键,设置编码器类型,此后 KmdFoc 会复位(如需设置编码器类型)
- 单击一次按键,以固定通信方式
- 连续点击三次按键,校准电机参数
- 连续点击四次按键,获取电机参数
- 连续点击五次按键,保存电机参数
- 连续点击二次按键,使能电机,如果成功使能电机,此时按键事件切换为应用事件
- 确认电机已经被使能
- 连续点击两次按键,切换模式为位置方式实现的拨轮旋钮功能
- 连续点击三次按键,切换模式为速度方式实现拨轮旋钮
- 连续点击四次按键,切换模式为带阻力功能的旋钮(就像扳手腕一样)
- 连续点击五次按键,切换模式为带阻尼回正的旋钮
- 连续点击六次按键,切换模式为回正的弹簧旋钮
- 连续点击七次按键,切换模式为自由模式
- 连续点击八次按键,切换模式为双电机互控,力矩放大模式
- 连续点击九次按键,切换模式为位置闭环方式实现的单方向控制
- 连续点击十次按键,切换模式为转速闭环方式实现的单方向控制
- 连续点击十一次按键,切换模式为四个电机相互控制模式,同样具备力矩放大功能。
- 单击一次按键,失能电机,此时再次被切换为普通的按键事件,需按两次按键再次使能电机
平衡车案例
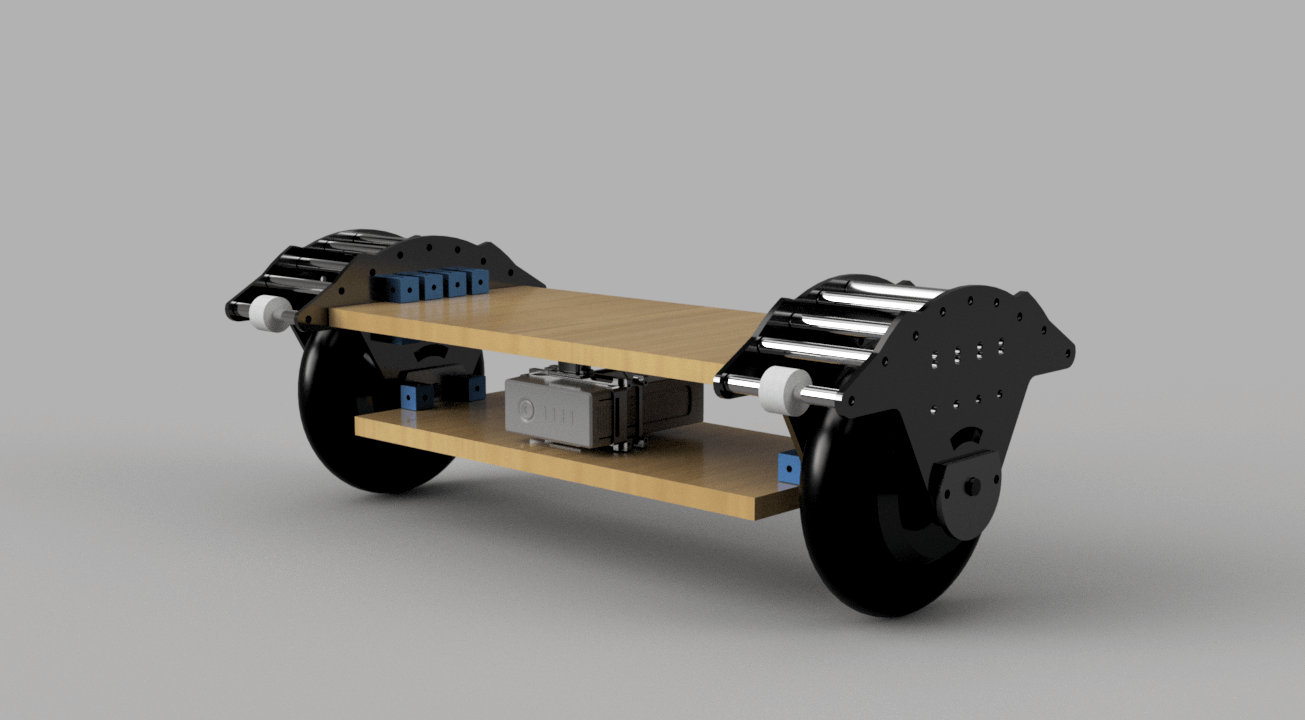
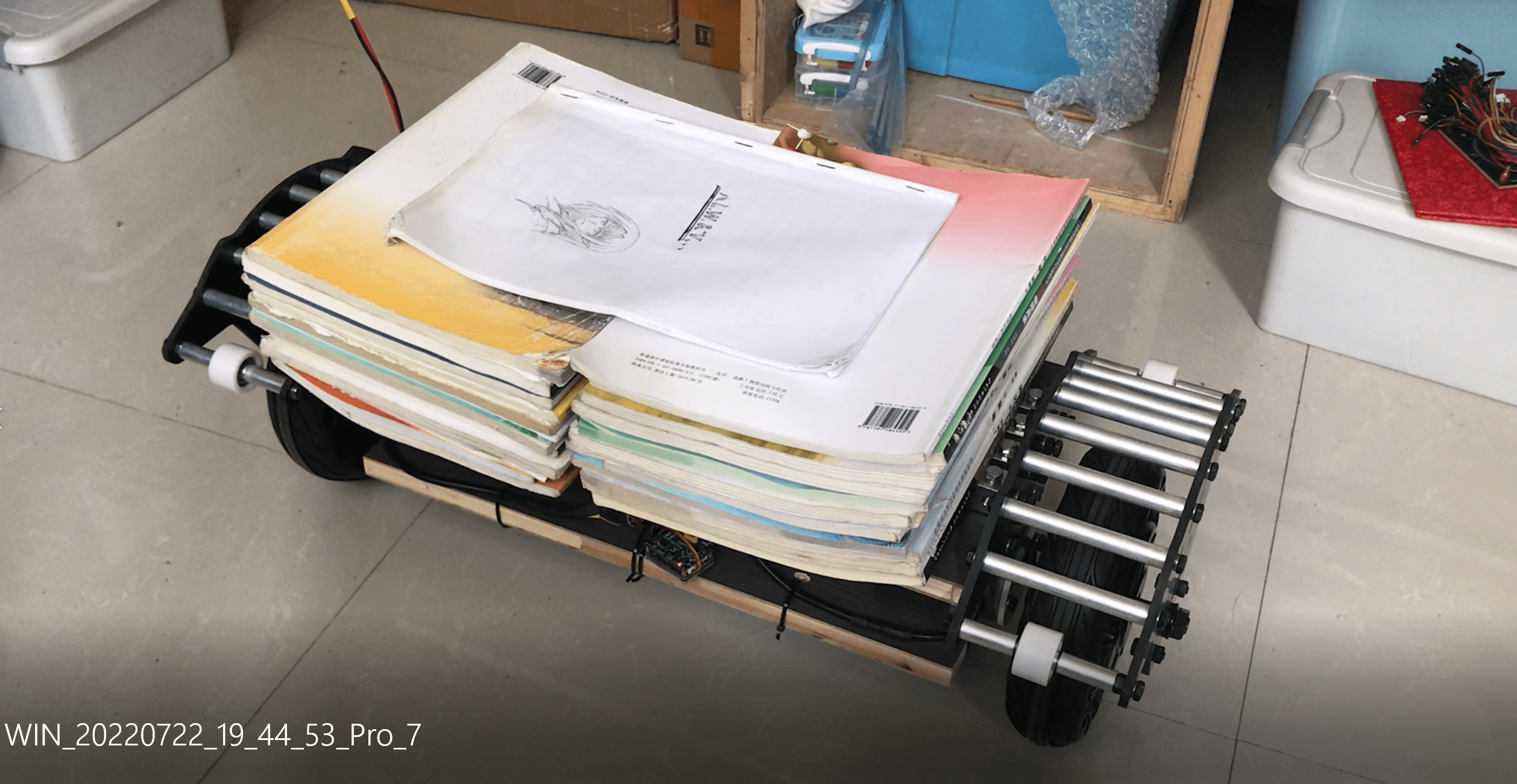
平衡车案例源码开源
同时提供基于 KmdFoc 和 Rm 的 C 板开发的平衡车代码,目前包含了直立环的一个演示,转向环和速度环自己加一下就行,比较简单。