应用与支持#
电机支持#
理论上对 2–30 极对数以内、16V~56V 电压范围内的电机均可支持。以下为已检验过的无刷电机示例。
已检验无刷电机#
型号 |
实物图片 |
说明 |
|---|---|---|
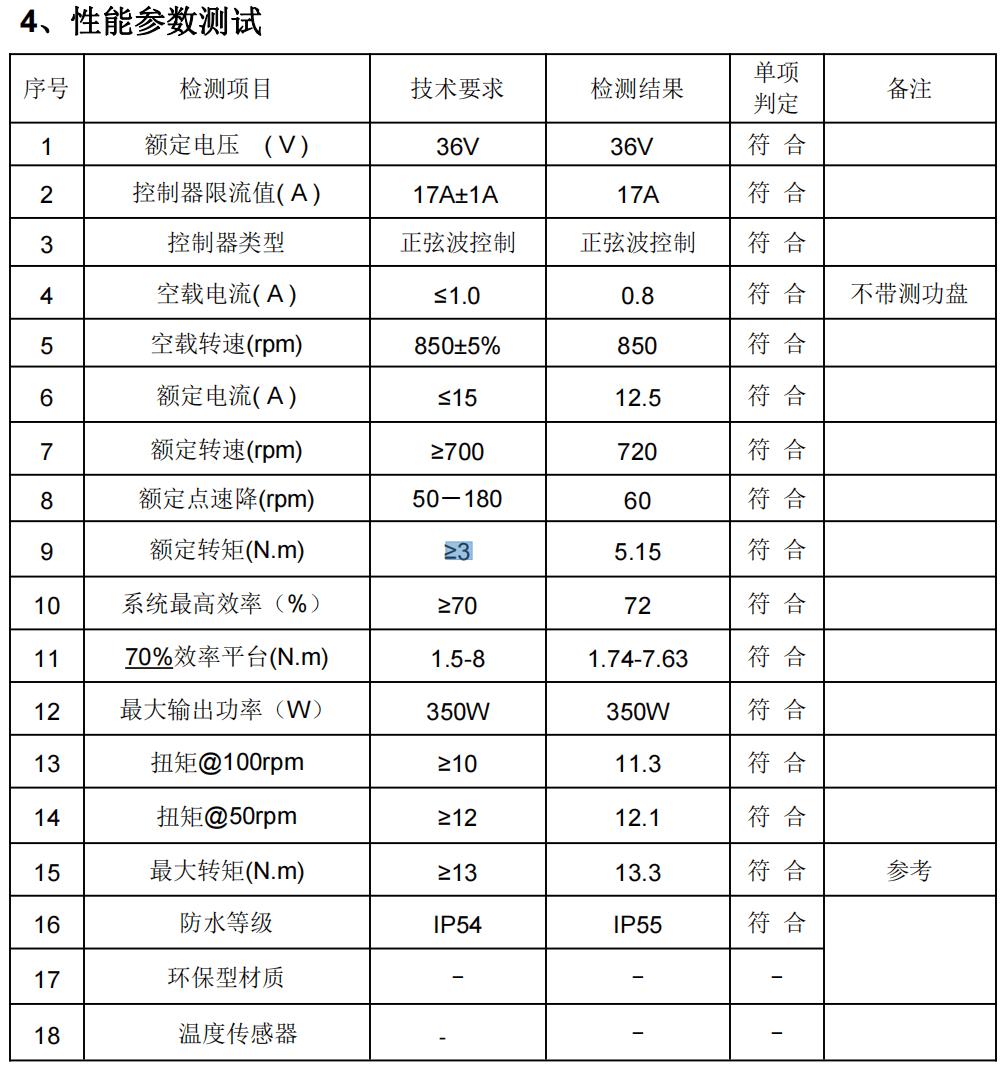
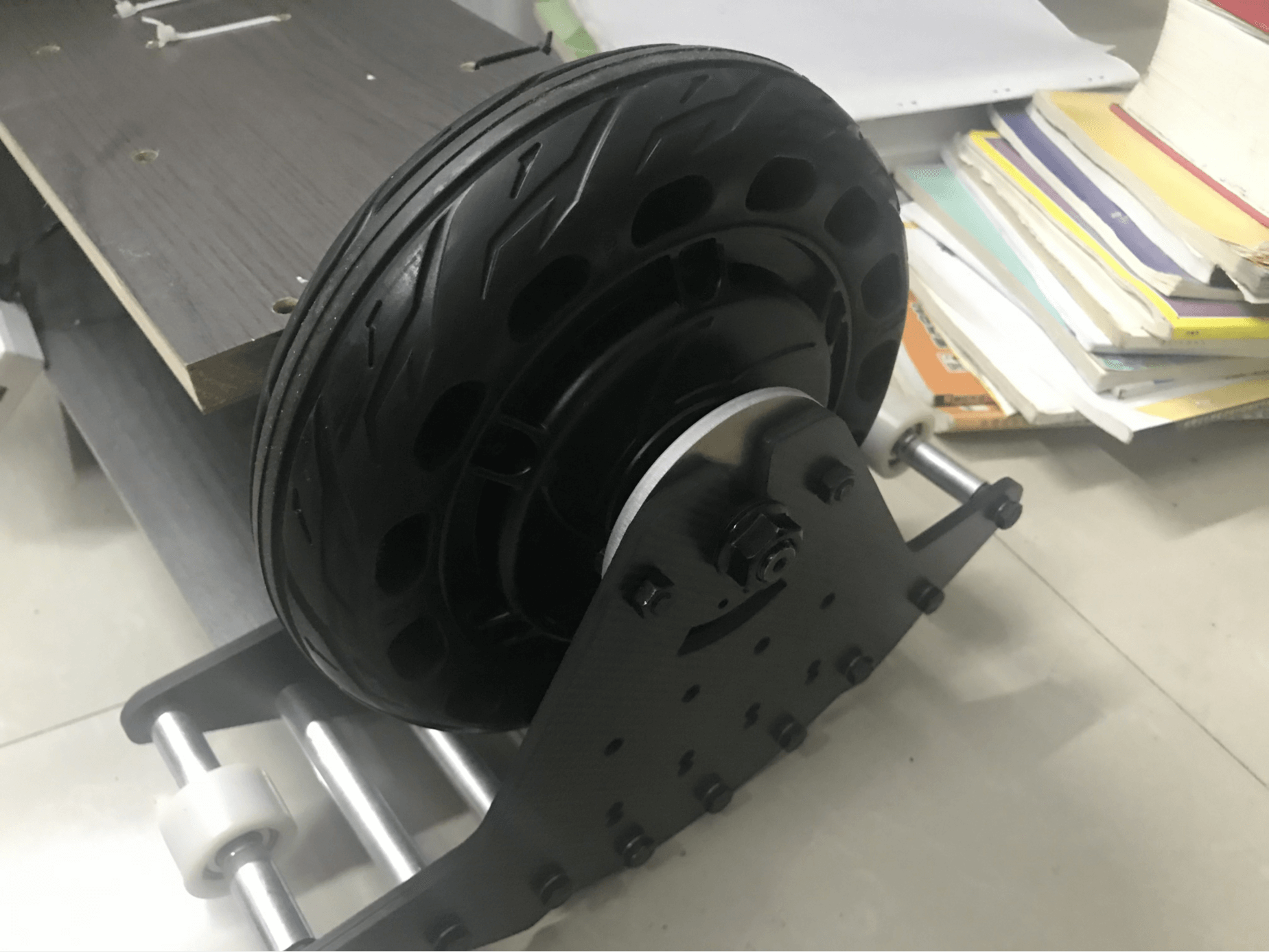
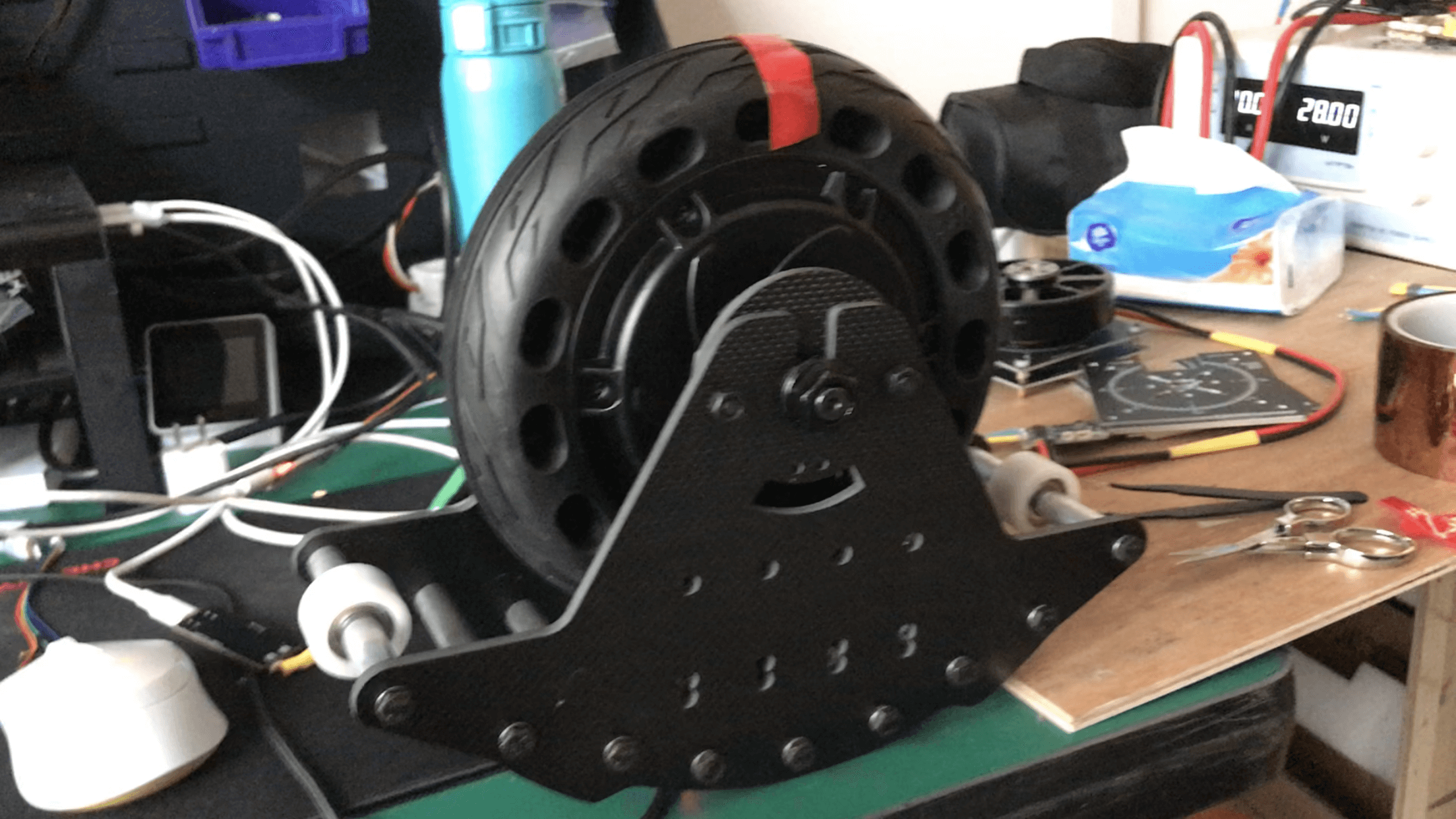
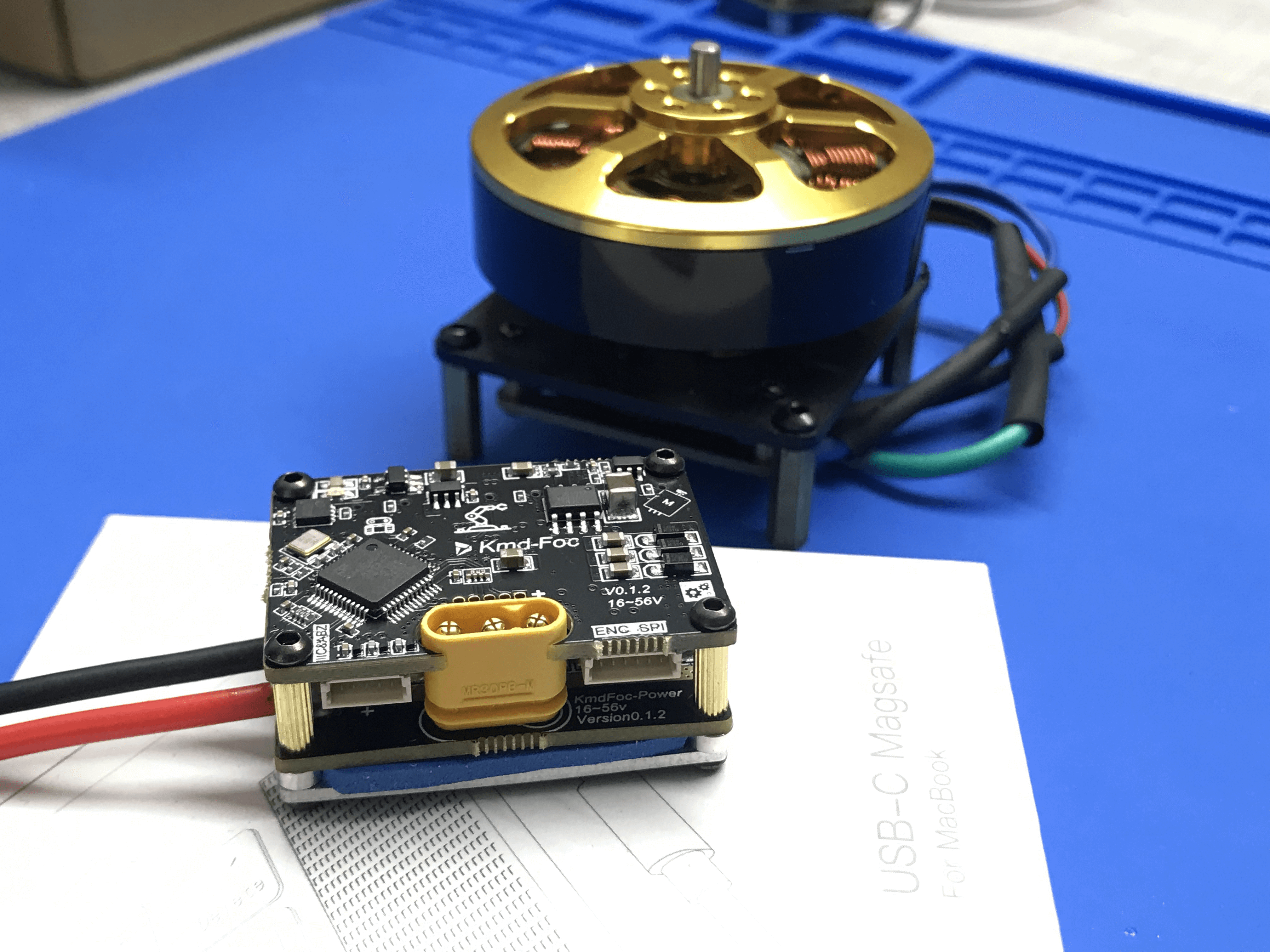
极飞A12 |
|
电压 48V 以下拆机电机,无具体参数,除臭点外可接受 |
5010-KV280 |
|
6S 电池 MAX:40~50A |
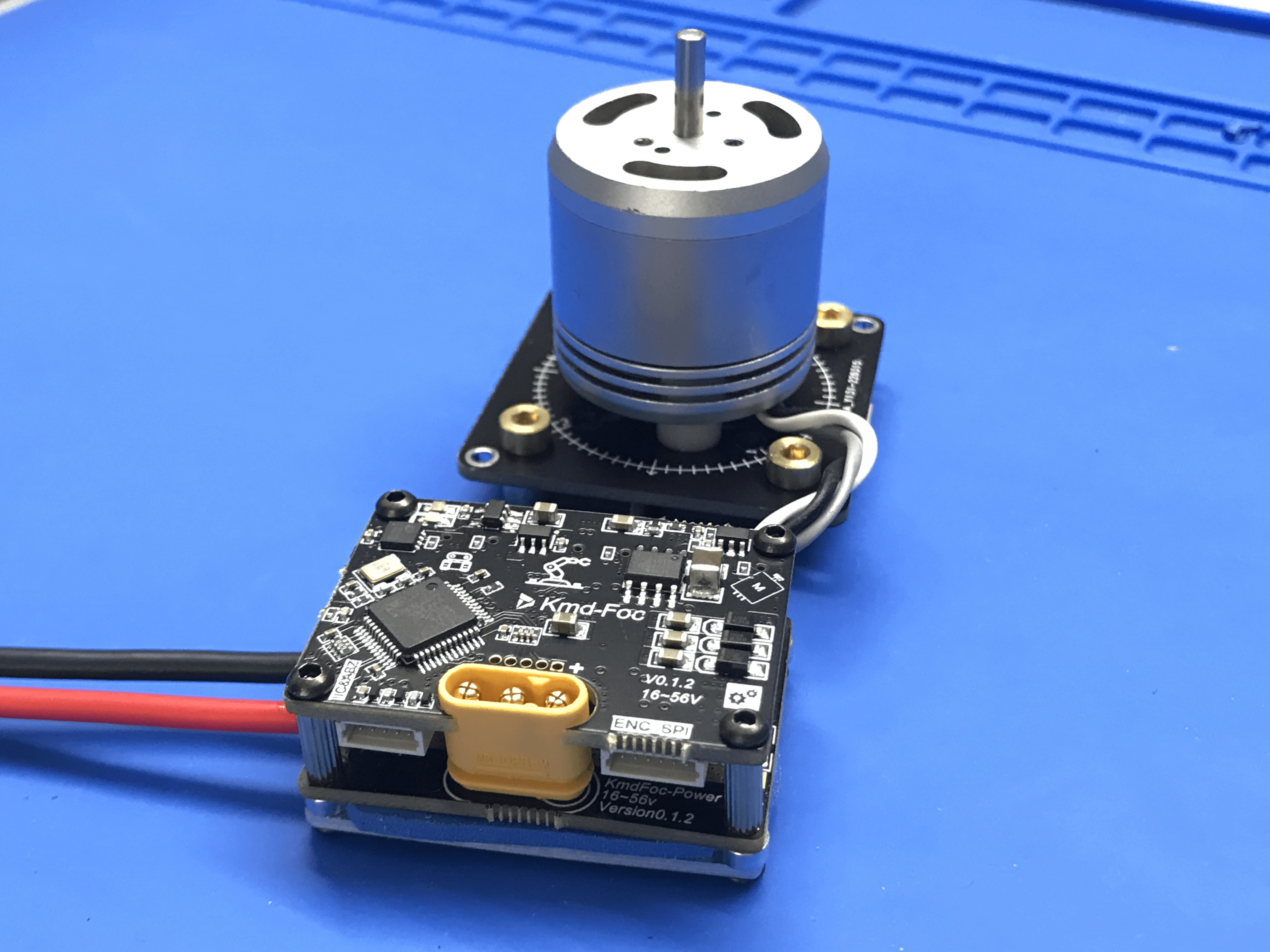
5008-KV335/KV400 |
|
6S 电池 MAX:40~50A |
DJI-SNAIL-KV2400 |

|
12~24V MAX:15~20A |
DJI-精灵-2312 |
|
12~24V(?) MAX:15~20A(?) |
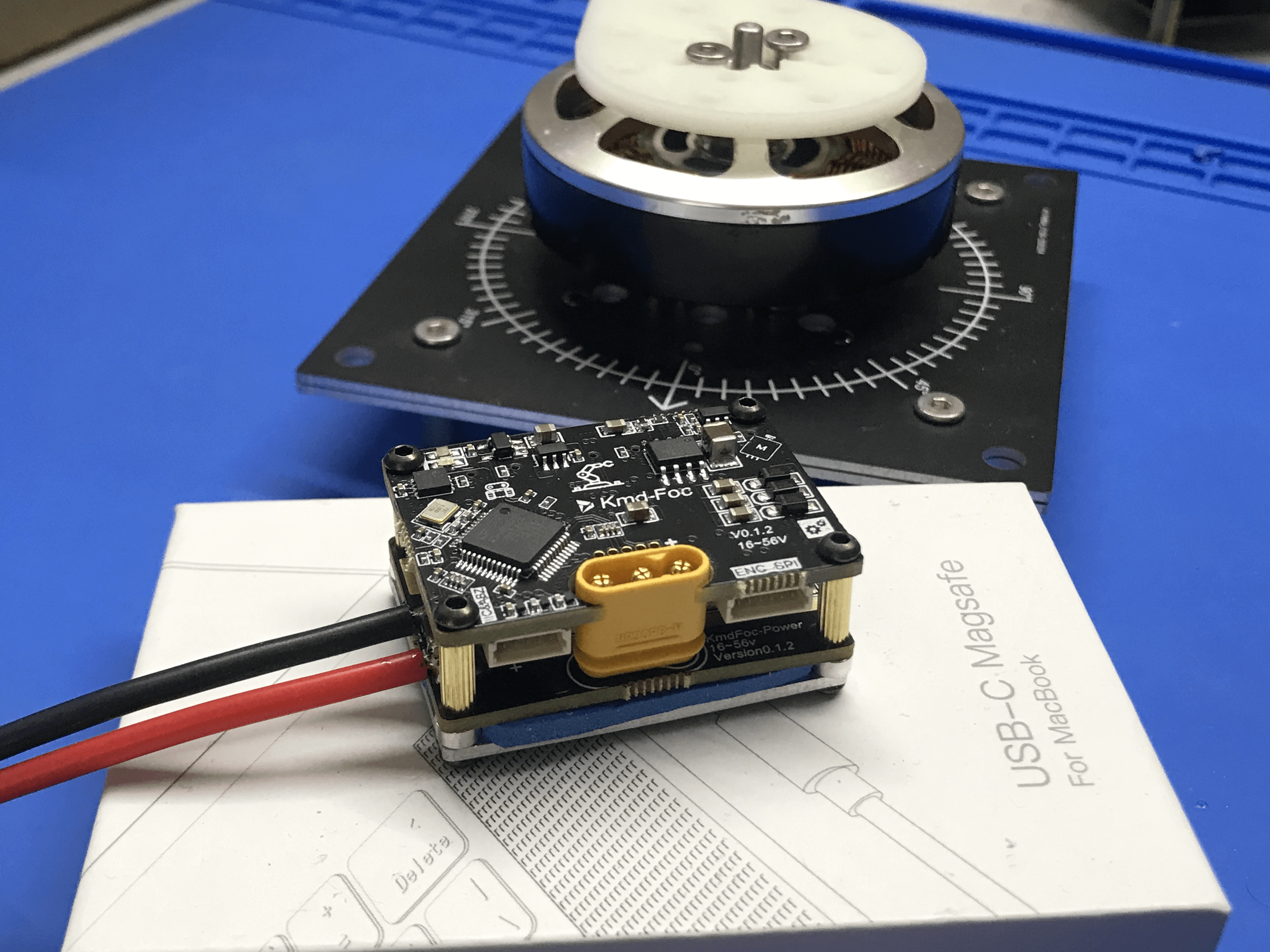
Sunnysky-X2212-Kv80 |

|
2~4S 电池 MAX:20A |
P80-KV120 |
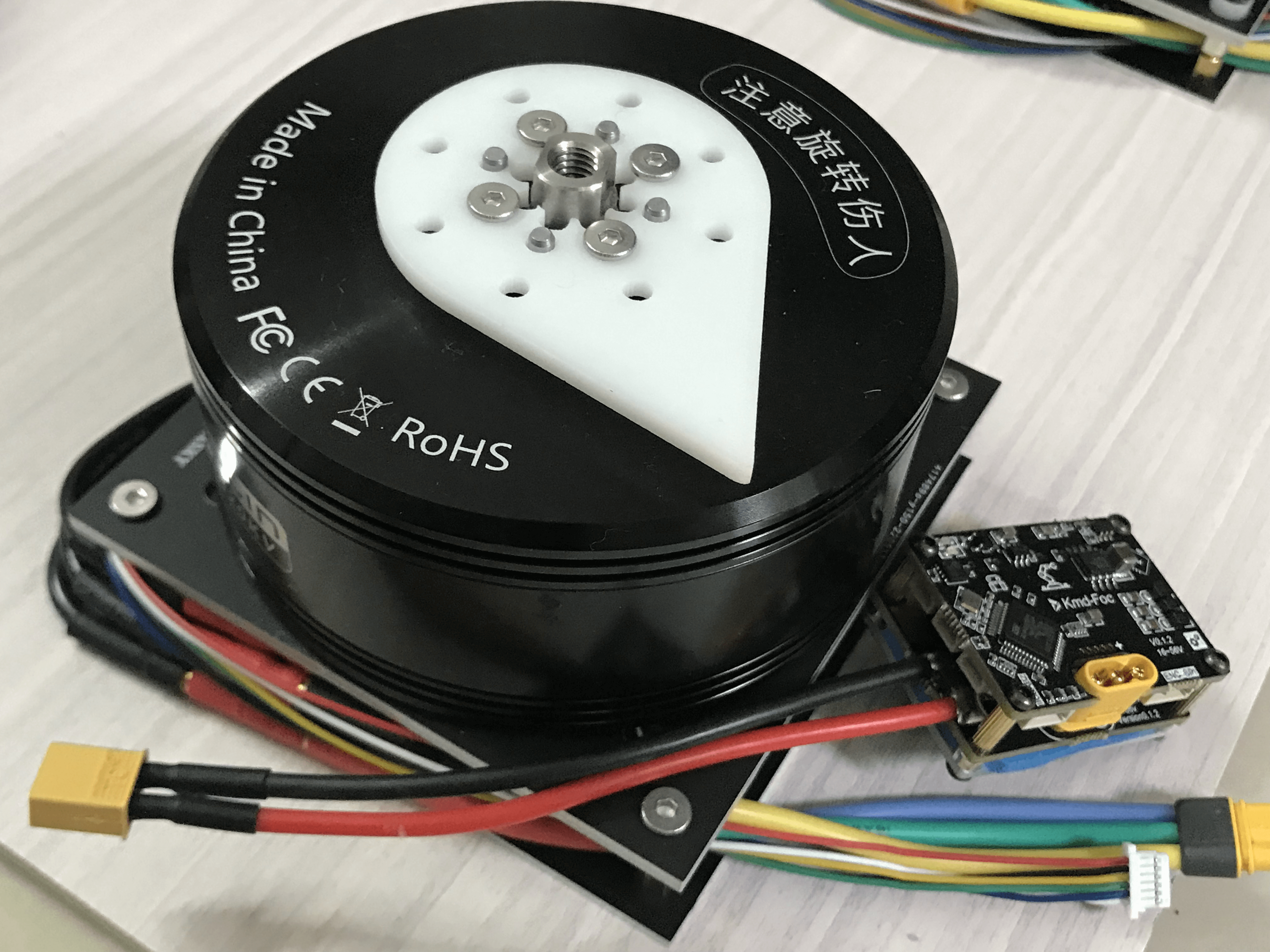
|
48V |
X8308S-KV180 |
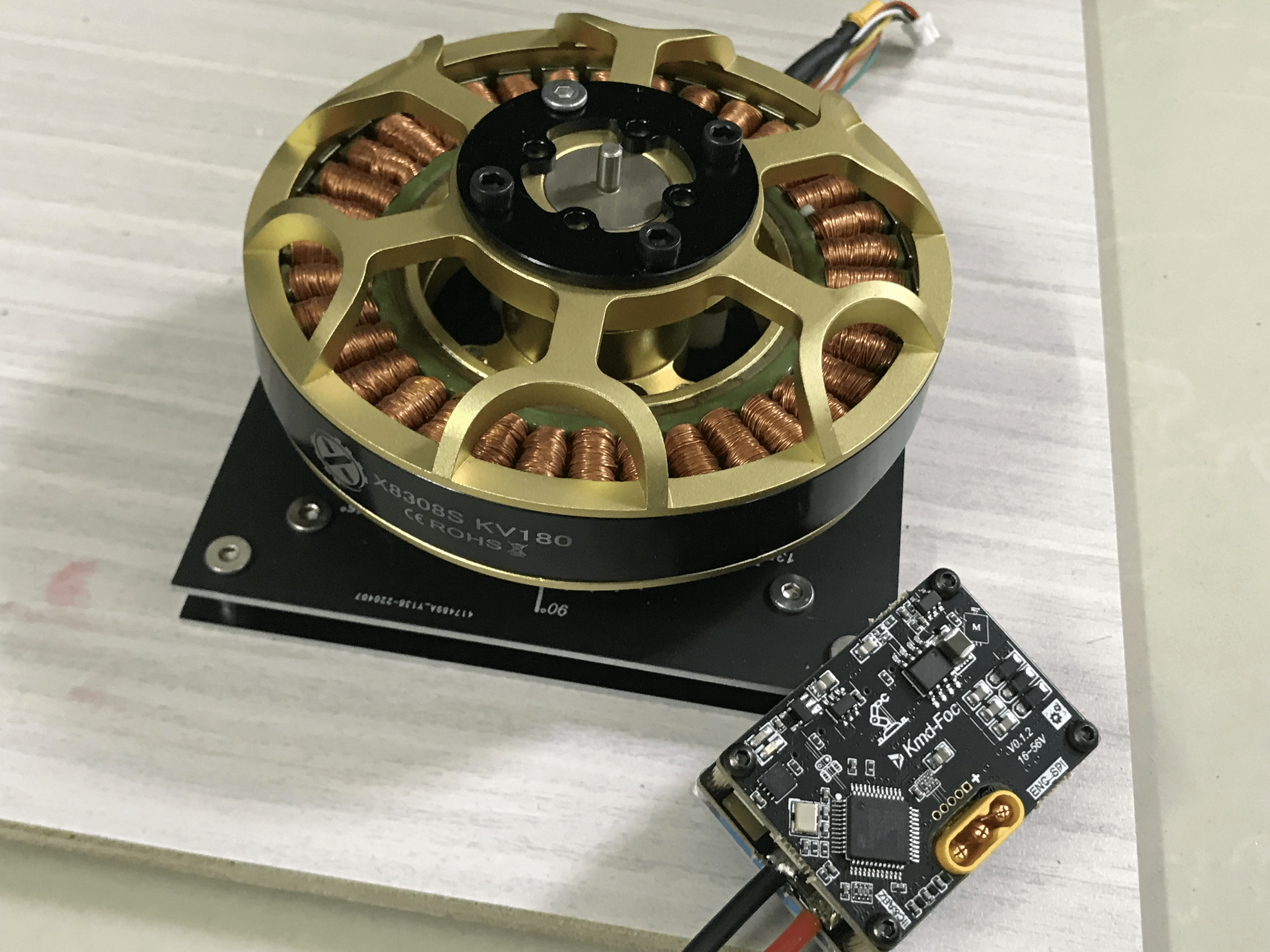
|
6~8s 电池 MAX:38A |
(极飞A12)&(5010-KV280)&(P80-KV120)&(X8308S-KV180) 参考值#
//供电28V
pos_gain = 60.0f;
vel_gain = 2.00f;
vel_integrator_gain = 0.125f;
vel_limit = 40.0;
current_limit = 40;
current_ctrl_bandwidth = 1000;
protect_under_voltage = 14;
protect_over_voltage = 48;
protect_over_speed = 50;
protect_over_current = 45;
(DJI-SNAIL-KV2400)&(DJI-精灵-2312)&(Sunnysky-X2212-Kv80) 参考值#
//供电24V
pos_gain = 30.0f;
vel_gain = 2.00f;
vel_integrator_gain = 0.125f;
vel_limit = 40.0;
current_limit = 25;
current_ctrl_bandwidth = 1000;
protect_under_voltage = 14;
protect_over_voltage = 28;
protect_over_speed = 50;
protect_over_current = 30;
备注
电流并非越大扭矩越大;同一电机在磁通饱和后扭矩达上限,再增大电流只会增加发热。请按电机参数设置电流限幅并选型。电流低于额定值时扭矩与电流大致成正比,超过额定后磁通饱和,扭矩难再提升。
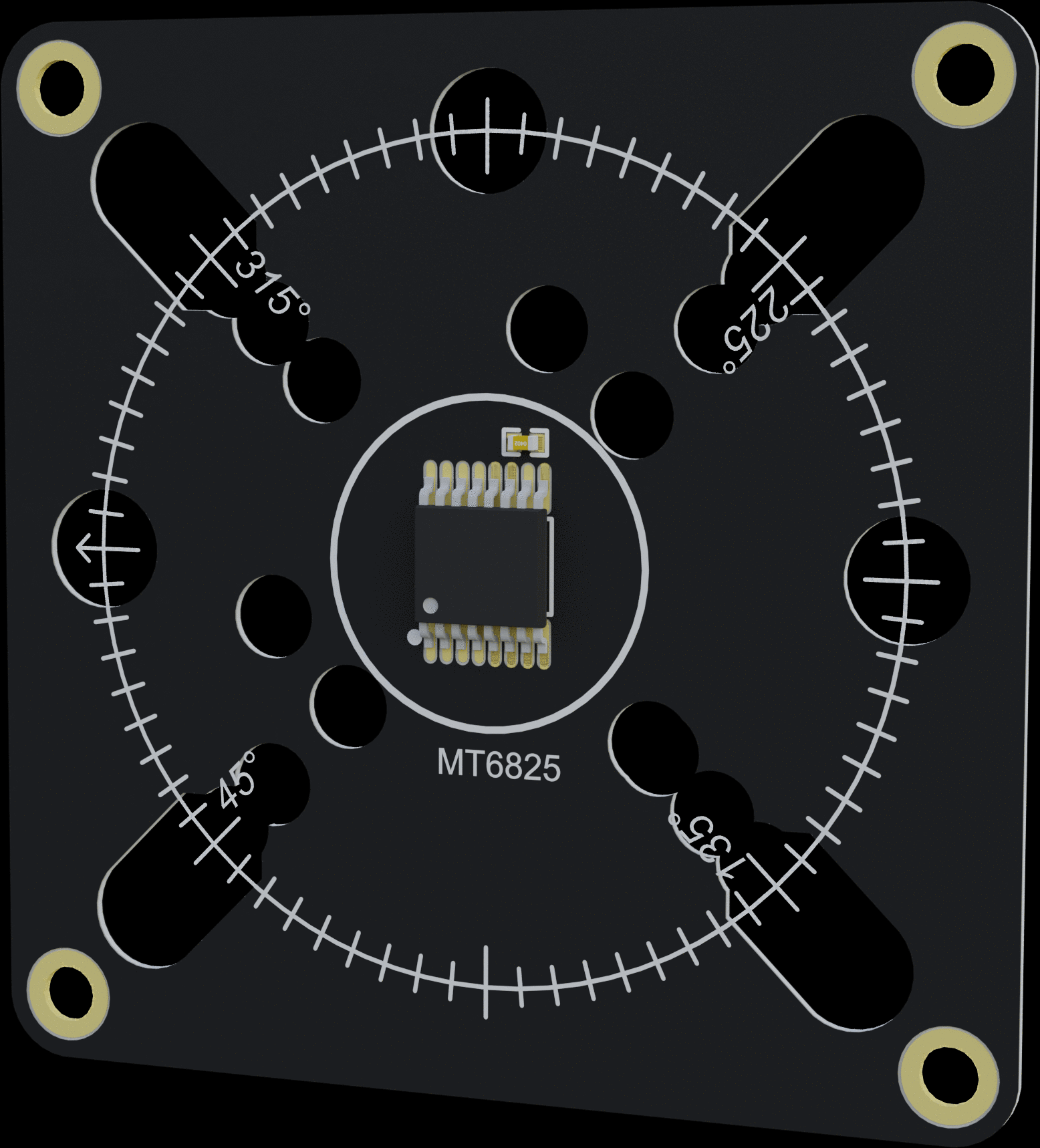
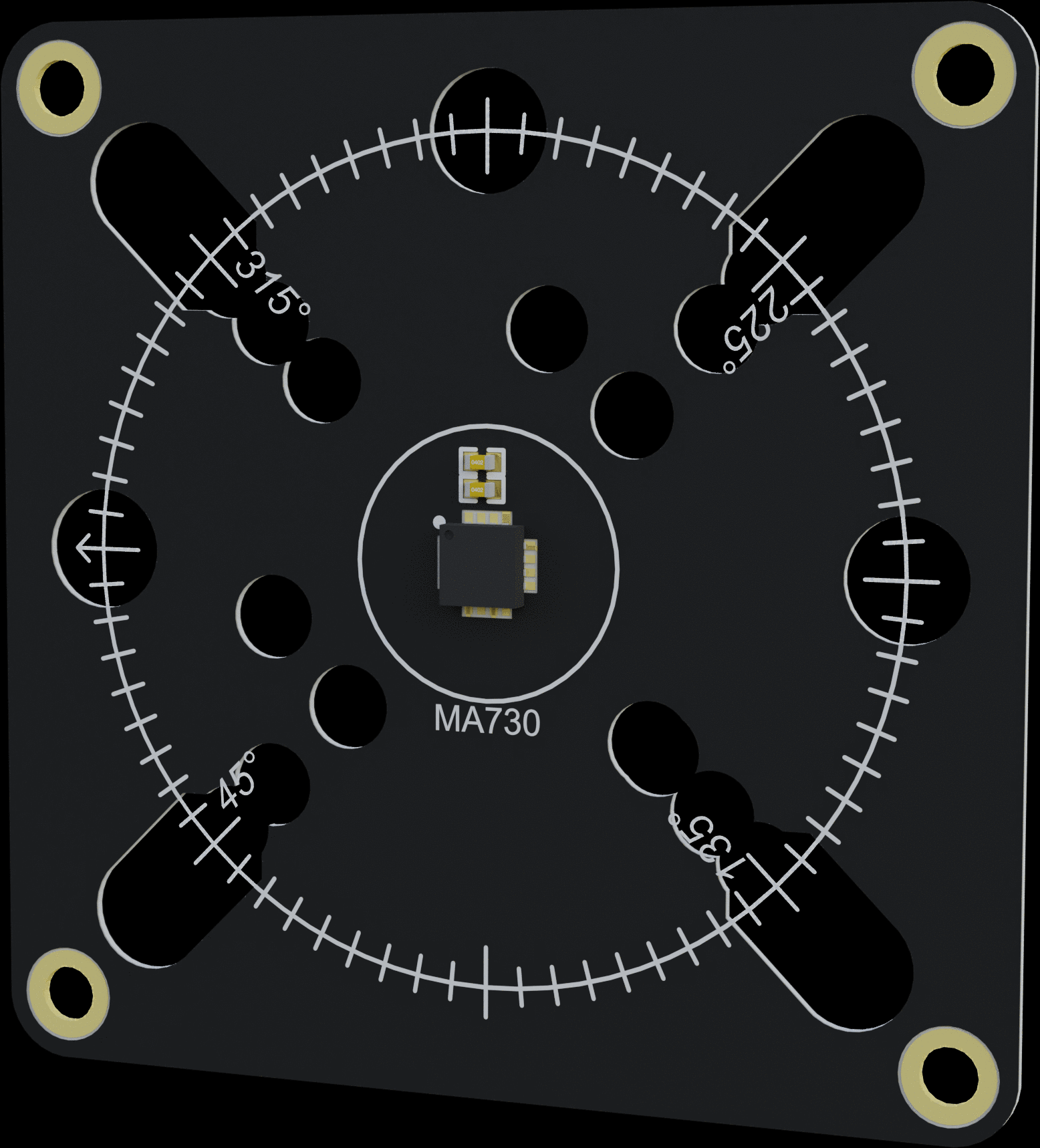
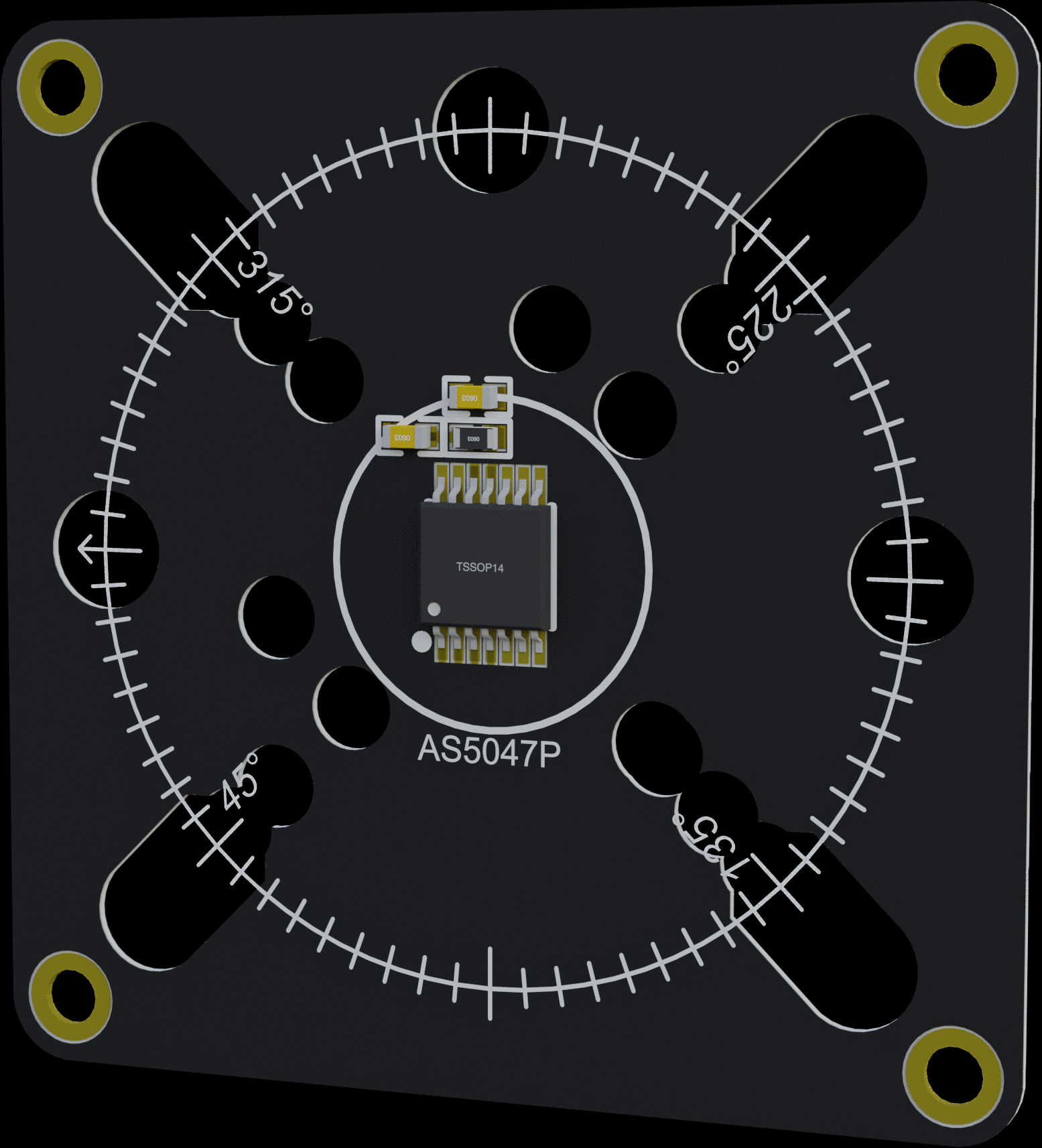
已支持的绝对值编码器#
目前已支持的绝对值编码器主要有以下几种,提供编码器 PCB 与原理图便于固定到电机,板端为 SH1.0 带锁扣端子。
备注
暂不支持 IIC 与 ABI 编码器:IIC 读角度耗时影响 FOC 周期;ABI 每次上电需校准对齐电气角,当前未纳入。
重要
MA730 位置响应延迟较大,闭环效果不如 MT6825/AS5047,不建议使用。
普通绝对值编码器 PLL 带宽建议 750~2000,分辨率过低时不宜过高(可参考霍尔编码器)。
参考值#
encoder_pll_bandwidth = 1000;
支持霍尔编码器与轮毂电机(目前仅测试一款轮毂电机)#
霍尔角度:120°
极对数:15
备注
霍尔编码器分辨率可计为 15×6 = 90,使用霍尔编码器电机时须在校准前将该值写入 kmdfoc 并保存。
备注
轮毂电机除分辨率和编码器型号外,需降低 PLL 带宽以获得更平滑的转速估计。
参考值#
encoder_pll_bandwidth = 90;
重要
HALL 编码器信号示意