Power INA226 技术手册#
备注
本手册为最早 V1.0 协议产品,与当前上位机不兼容。
项目开源#
实物#
参数说明#
输入限制 ≤ 40V
模块限制分流电压 81.92mV
使用5mR采样电阻,则最大可测量电流为16.384A,最大功率为640W(理论值)
实际测试 输入电压24V 输入电流6A 功率144W 没有问题,我感觉跑15A应该是没有问题的,限于测试条件,直流源最大输出6.1A,因此更大电流无法测试。
协议#
模块源码已开源,当前为只输出、不可通信控制;修改输出协议请直接改源码。
USART#
配置为波特率 115200,8 位数据位,1 位停止位,无硬件流控,无校验位,发送频率100Hz
接口:Seasky 串口通信协议,详见 Sailor 通信协议。
INA226 模块数据(float 长度 4):
数据 |
说明 |
|---|---|
INA226_USART_ID |
|
ina226_flag |
|
float_data[0] |
|
float_data[1] |
|
float_data[2] |
|
float_data[3] |
函数发送接口(USART)#
void ina226_uart_send(void)
{
static float tx_data[4];
static uint8_t tx_buf[50];
static uint16_t tx_buf_len;
tx_data[0] = ina226_data.Power;
tx_data[1] = ina226_data.voltageVal;
tx_data[2] = ina226_data.Shunt_Current;
tx_data[3] = ina226_data.Shunt_voltage;
get_protocol_send_data(INA226_USART_ID, CAL, &tx_data[0], 4,
&tx_buf[0], &tx_buf_len);
for (uint16_t i = 0; i < tx_buf_len; i++) {
while ((USART1->SR & USART_FLAG_TC) == 0);
USART_SendData(USART1, tx_buf[i]);
}
}
CAN#
波特率 1Mbps,发送频率 100Hz。
协议说明(单次发送、单 ID):
信号数据:
ID |
union |
uint16_t |
u8 |
0X311 |
功率 |
Power_Val |
|
电压 |
voltageVal |
||
电流 |
Shunt_Current |
||
分流电压 |
Shunt_voltage |
功率测量模块发送接口(CAN)#
void can_send_msg(s16 mt1, s16 mt2, s16 mt3, s16 mt4)
{
CanTxMsg TxMessage;
TxMessage.StdId = CAN_Tx_Msg;
TxMessage.ExtId = 0;
TxMessage.IDE = CAN_Id_Standard;
TxMessage.RTR = CAN_RTR_Data;
TxMessage.DLC = 8;
TxMessage.Data[0] = mt1 >> 8;
TxMessage.Data[1] = mt1;
TxMessage.Data[2] = mt2 >> 8;
TxMessage.Data[3] = mt2;
TxMessage.Data[4] = mt3 >> 8;
TxMessage.Data[5] = mt3;
TxMessage.Data[6] = mt4 >> 8;
TxMessage.Data[7] = mt4;
CAN_Transmit(CAN1, &TxMessage);
}
void ina226_can_send(void)
{
s16 tx_data[4];
tx_data[0] = ina226_data.Power;
tx_data[1] = ina226_data.voltageVal;
tx_data[2] = ina226_data.Shunt_Current;
tx_data[3] = ina226_data.Shunt_voltage;
can_send_msg(tx_data[0], tx_data[1], tx_data[2], tx_data[3]);
}
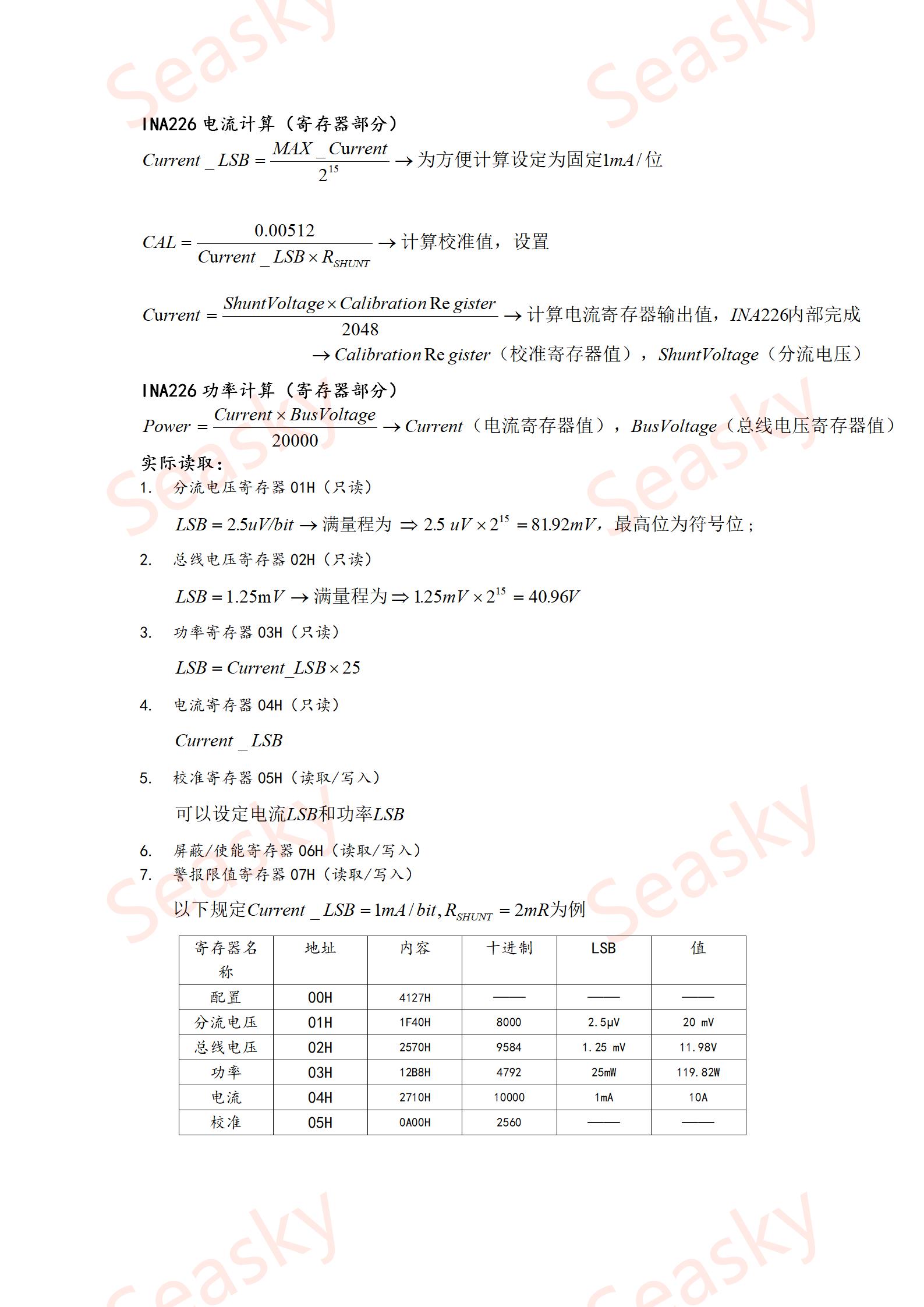
INA226 配置说明#
更多说明见芯片手册。
串口协议说明#
